Электросцепка для Piko BR78

Спустя чуть больше года эксплуатации Piko 50614 на макете, я решил дооснастить паровоз автоматической цифровой электромагнитной сцепкой ESU 41002.
Именно сцепкой, поскольку она будет только одна и располагаться сзади. За все время я ни разу не воспользовался передней сцепкой, кроме того, она только портит вид, поэтому я просто заменю её на декоративную из комплекта накладных деталей.
Основываясь на удачном опыте с Piko 52440, я буду использовать декодер ESU LokPilot 5, который так же решит проблему с эффектом огня в топке, о которой писал в предыдущем посте. Для управления сцепкой я изначально хотел использовать выход AUX5, отведенный под дымогенератор, который я никогда не планирую его устанавливать.
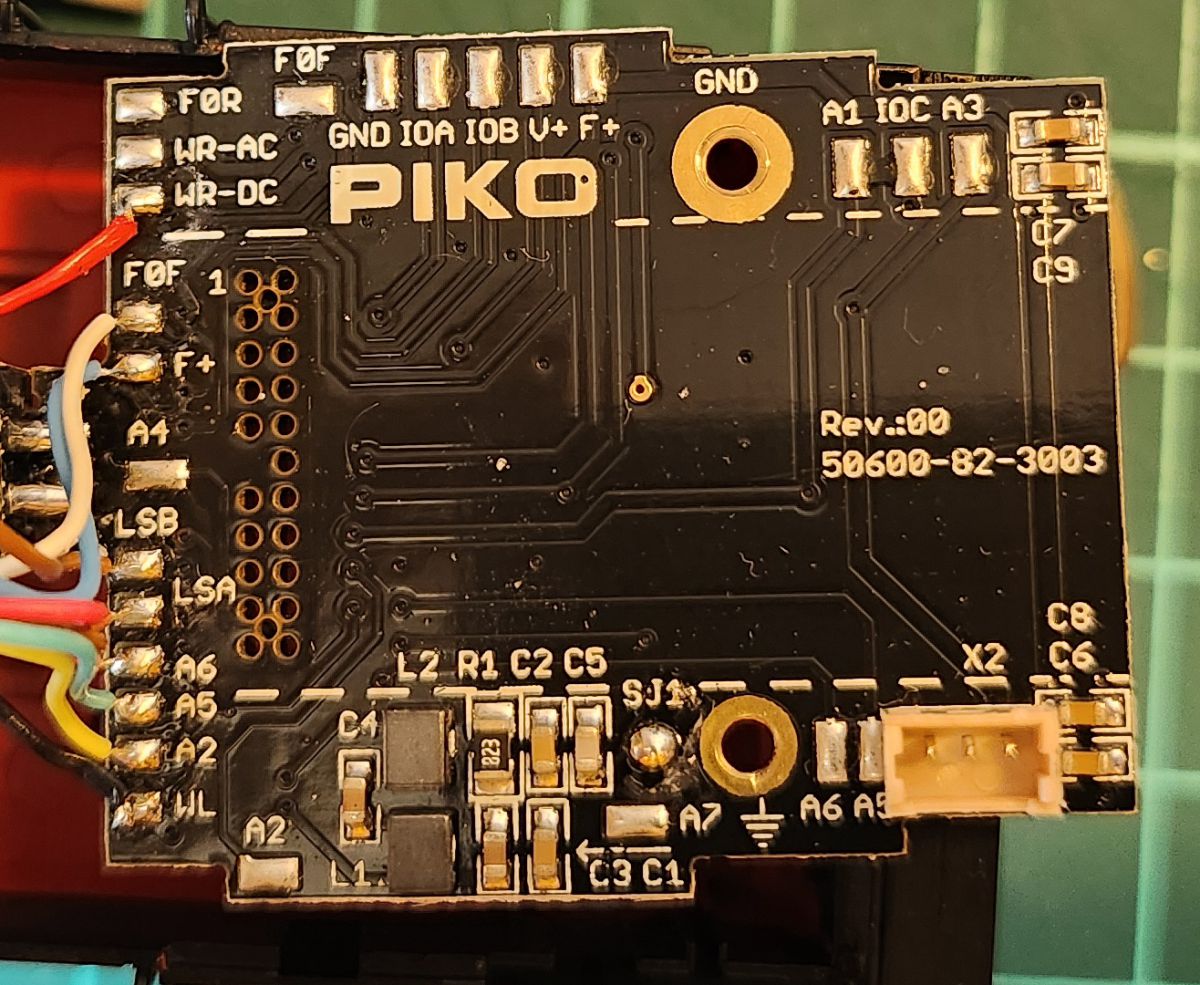
На плате контактная площадка этого выхода накрыта разъемом для подключения освещения будки, поэтому припаять к ней провод сцепки, не повредив разъем, не получится. Зато рядом есть доступные площадки AUX6 и AUX7, которые в других версиях модели отвечают за передний и задний прожекторы, но поскольку у меня прожекторов нет, буду использовать AUX7. Это сразу накладывает ограничение на выбор используемого декодера: для управления сцепкой нужен силовой выход, а у многих производителей они заканчиваются на AUX4, к моему счастью у LokPilot 5 все выходы силовые.
Установка сцепки
Установка сцепки началась с неожиданных проблем, добраться снизу до защелки, которая держит сцепку в NEM-шахте, нет возможности, она надежно прикрыта декоративным бачком.
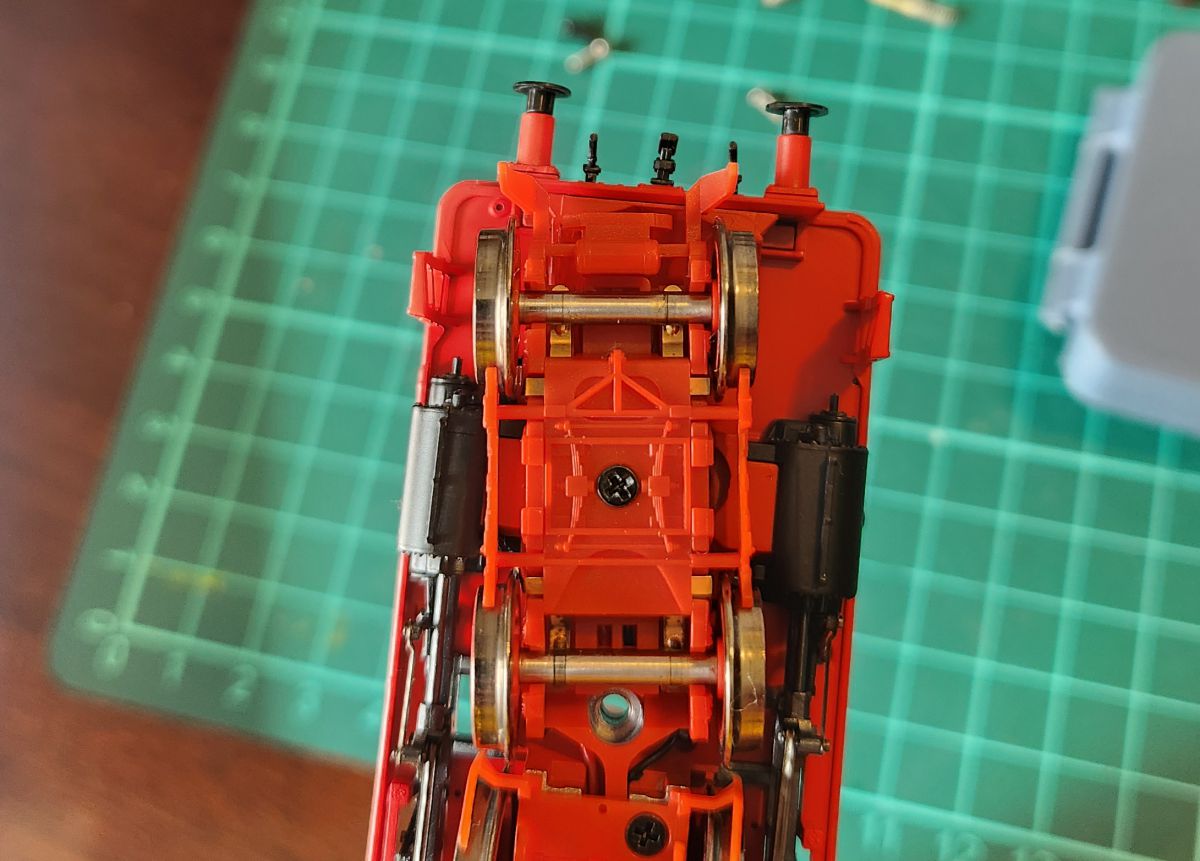
Как удалось выяснить опытным путем, для замены сцепки нужно ослабить винт снизу тележки, чуть потянуть на себя нижнюю крышку, которая держит токосъем и сцепку, вынуть держатель сцепки, состоящий из 2 частей, и только тогда уже менять сцепку.
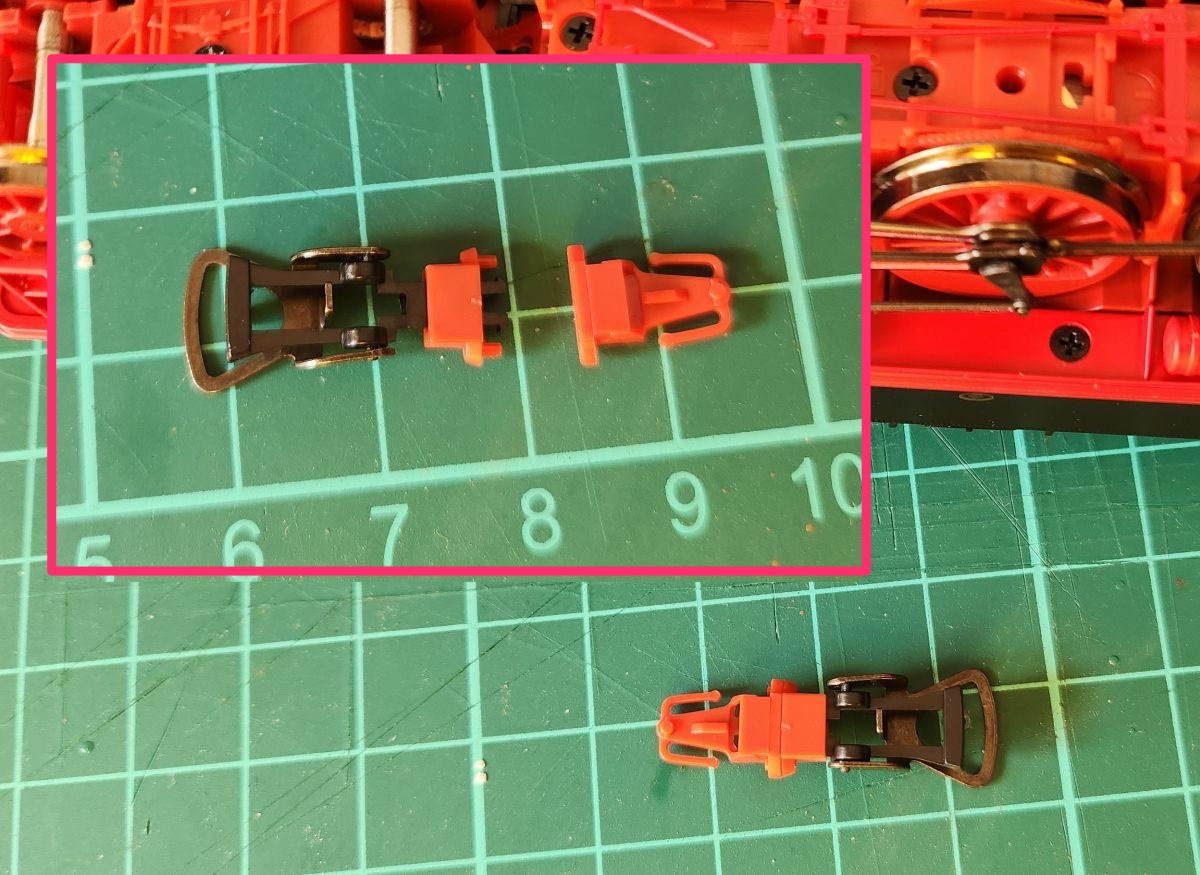
Со сцепками у Piko BR 78 вообще все не очень здорово. Я снял переднюю сцепку и заменил накладные детали на те, что были в комплекте для варианта "без сцепки". Но при прохождении радиуса 371 мм. выступающая часть телеги упирается в свисающие накладные и... ну в общем как повезет, либо упрется и паровоз застрянет, либо телега снесет накладные или сломает их. Накладные пришлось оставить те, что были изначально, зря только их снимал.
От задней, теперь электромагнитной, сцепки я проложил провода между тележкой и корпусом, внутрь пропустил там же, где проходят провода токосъема с тележки. Родные провода от сцепки ESU 41002 пришлось удлинить почти в 3 раза, поскольку их хватало только до противоположного края тележки. Учитывая предыдущий опыт с проводами, я закупил специальный тонкий провод 30 AWG, и он действительно пригодился.
Внутри модели все оказалось несравнимо сложнее, чем в подготовленной под сцепки Piko 52440. Плата утоплена в корпус, поэтому подлезть паяльником, чтоб припаять провода сцепки не получится (наверное можно попробовать но риск поверить корпус слишком велик). Плюс отверстие, через которое вхоядят провода от сцепки в корпус находятся под платой, поэтому ее точно придется снимать.
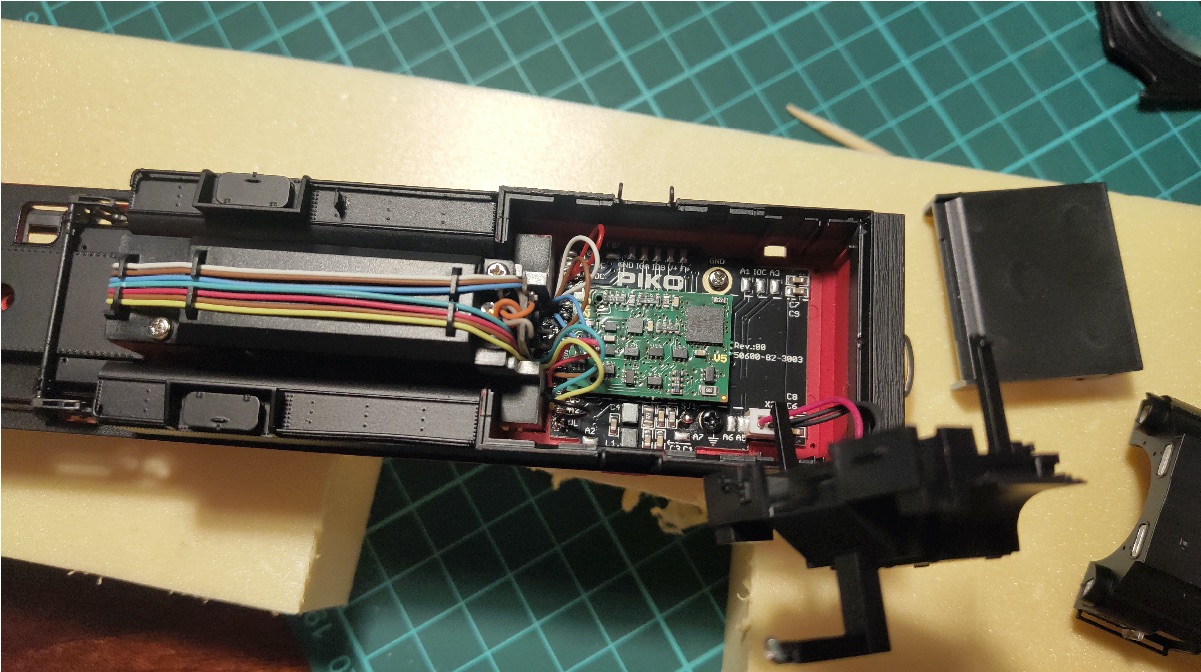
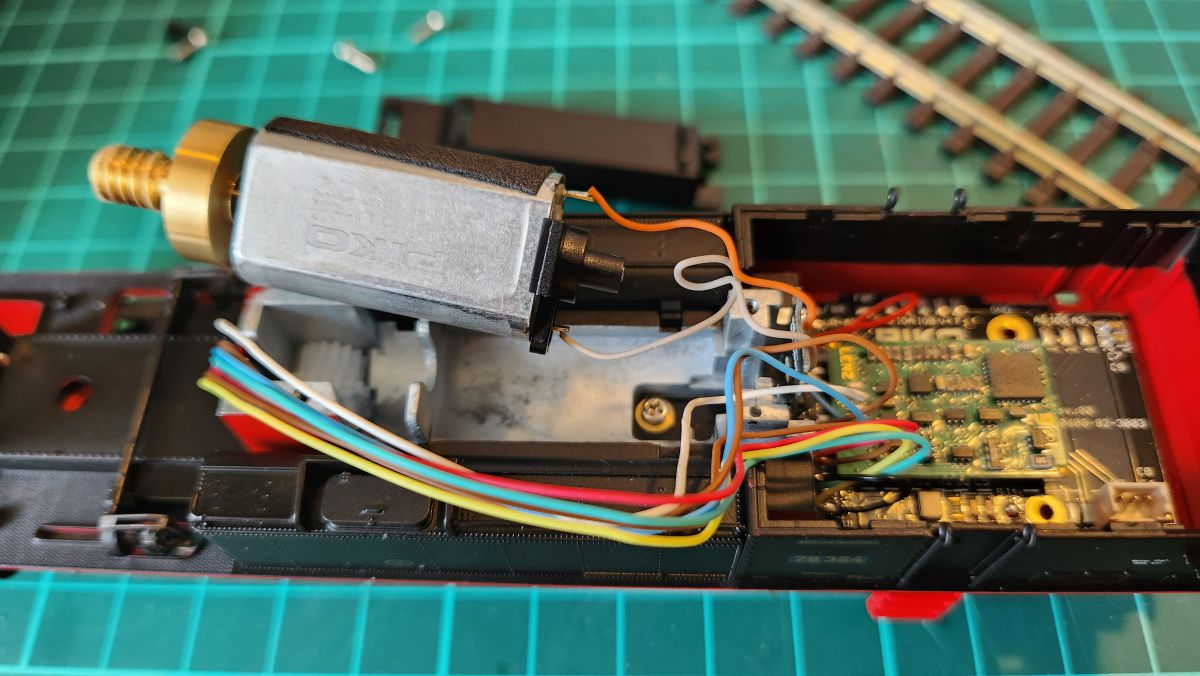
Сначала нужно разобрать модель, до состояния, описанного в предыдущем посте, получится то, что на фото выше. Затем отключить разъем с платы, чтоб освещение кабины не мешалось в дальнейшем.
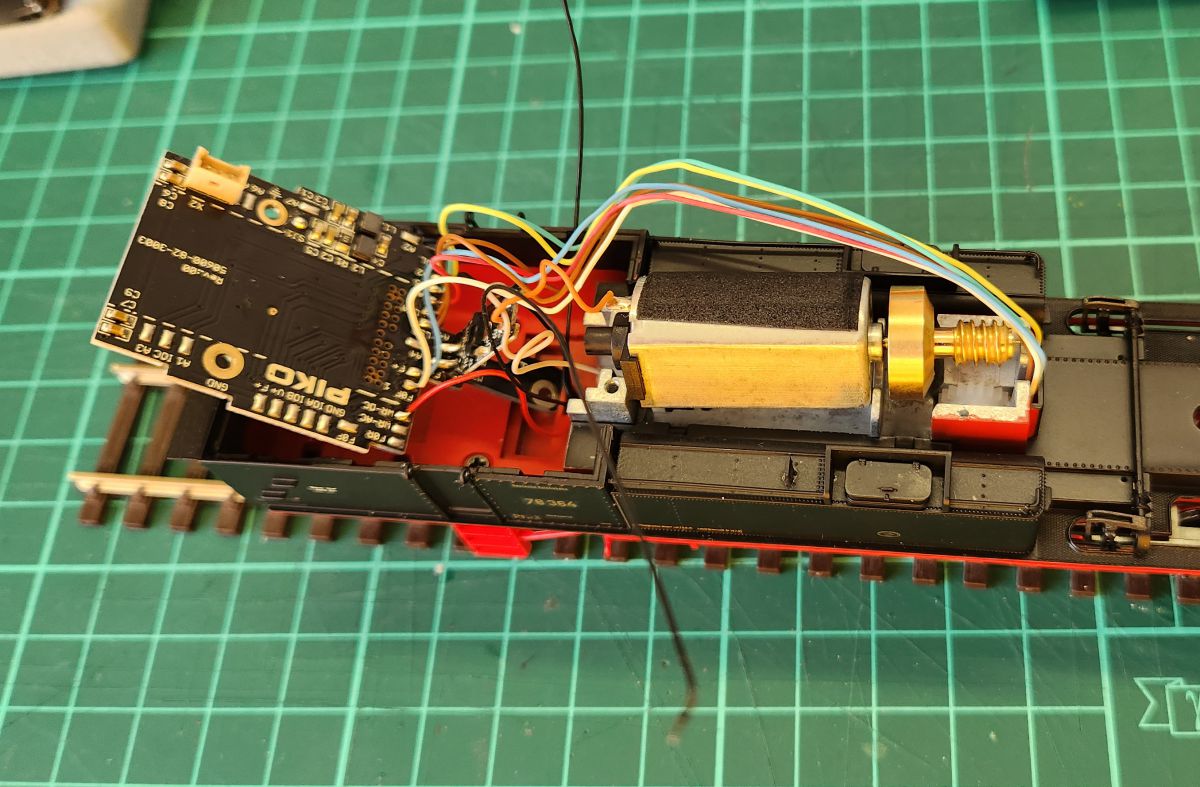
Это была простая часть, теперь сложное. Плата держится на 3 винтах, два видны сразу, а вот третий... находится под мотором! Что бы туда добраться нужно: освободить все провода, которые красиво проложены под котлом, отвернуть 2 винта на крышке мотора, по которой были проложены провода, используя запас проводов, плотно сложенный в будке, снять крышку над мотором.
Теперь можно вынуть мотор, так же используя запас проводов из будки. Его будет сильно ограничивать короткий оранжевый провод сверху, возможно его стоит отпаять т.к. у меня он не выдержал дальнейших манипуляций и оторвался, пришлось припаивать. Серый провод от мотора более длинный и проходит через пластмассовую опору оси мотора, которая вынимается вместе с мотором и быстро соскакивает, при сборке ее нужно будет правильно поставить обратно.
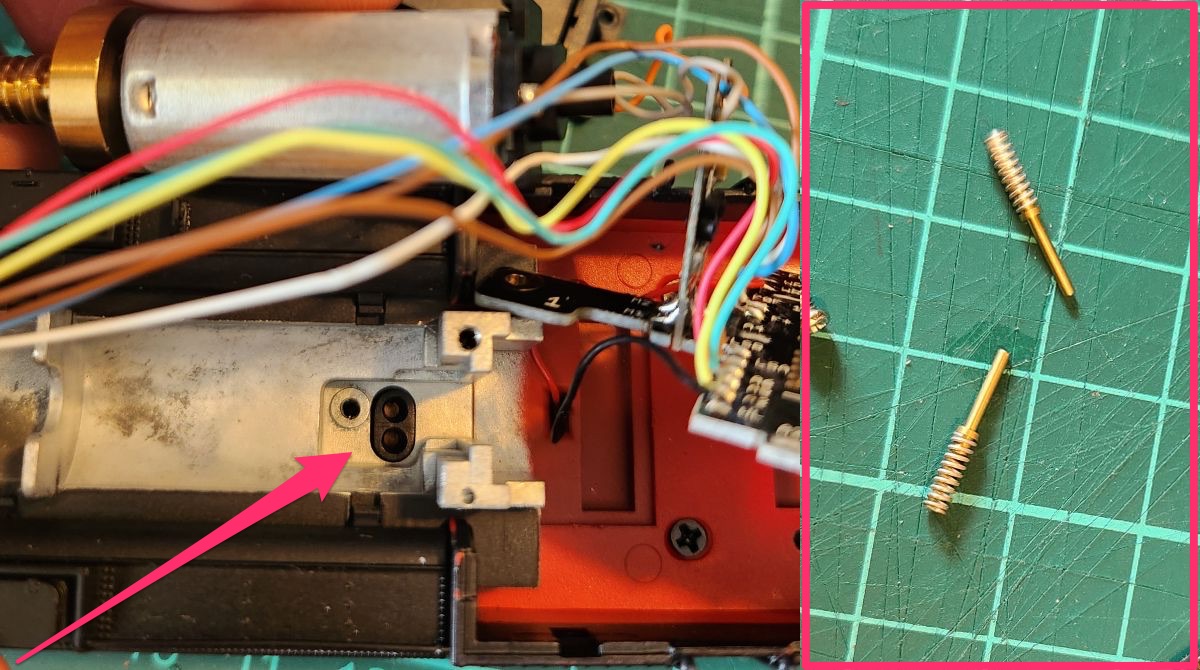
Наконец есть доступ к последнему винту крепления платы, открутив который, плату можно сдвинуть на небольшое расстояние, которое позволяют провода, но достаточное чтоб проложить провода от сцепки и припаять. Осторожно! Под платой два контакта с пружинками, один из них точно выпадет, когда модель будет перевернута для прокладки проводов. Их лучше сразу достать, и не забыть вернуть обратно при сборке.
Сложная часть закончилась, проложить и припаять провода от сцепки к плате в таком состоянии будет достаточно просто. А после этого начинается самое сложное - собрать все обратно. Это будет действительно непросто, поскольку разворошенную гору проводов нужно так же аккуратно сложить обратно и свернуть запас в будке, чтоб котел встал на место и будка закрылась и защелкнулась. У меня это вышло с 3-го подхода, а на то, чтоб разобрать и собрать все обратно со сцепкой ушел не один час.
Настройка декодера
Далее по тексту снова будут отсылки к страницам инструкции для декодера ESU LokPilot 5, которую можно скачать отсюда.
Первым делом произвожу рекомендованные настройки для моторов Piko и затем автоматическую калибровку мотора: нужно записать CV54=0 и нажать F1 на пульте, модель проедет почти 1 метр на полной скорости и запишет себе CV51-55. Подробнее см. страницу 53 и 55 из инструкции:
| CV2 | CV9 | CV51 | CV52 | CV53 | CV54 | CV55 | CV56 | CV116 | CV117 | CV118 | CV119 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| По-умолчанию | 3 | 40 | 10 | 10 | 130 | 50 | 100 | 255 | 50 | 150 | 15 | 20 |
| PIKO® 5-Pol Motors (new Motor) | 3 | 25 | 15 | 20 | 110 | 30 | 40 | 220 | 50 | 100 | 10 | 25 |
| Результат авто калибровки | 11 | 5 | 83 | 24 | 23 |
С настройками по-умолчанию модель едет не очень, после рекомендованных - движение начинается с резкого рывка, а вот после авто калибровки начинает ехать как надо. Это все таки киллер-фича декодеров ESU, делающая его на голову выше конкурентов.
Теперь произвожу настройку выхода AUX7 для управления сцепкой, см. страницу 65 инструкции:
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Index register | 32 | 0 | 12.2.1. Index CV access, стр. 56 |
| AUX7 Mode Select CV | 323 | 33 | Autocoupler coil#2 |
| AUX7 Switching-On/-Off Delay | 324 | 3 | Range 0-15, Time 0-6,144 sec |
| AUX7 Automatic Switch Off | 325 | 4 | unit is 0.4 sec * 5 = 2.0 seс |
| AUX7 Brightness CV | 326 | 8 | range 0 - 31 |
Значение для Mode Select CV равное 33 (Autocoupler coil#2) нет в документации, взято из LokProgrammer и еще одной неофициальной инструкции.
Задержка "Switching-On/-Off Delay" нужна для того, чтоб сцепка не включалась сразу при толкании в рамках маневра расцепления, это немного снизит ее износ. В ручном режиме эта настройка не имеет смысла.
Можно проверить работу сцепки в ручном режиме кнопкой F9. Будьте готовы сразу убрать модель с рельсов, чтоб не спалить сцепку, если что-то пойдет не так.
После успешной проверки нужно задать параметры маневра автоматического расцепления (см. стр. 83 инструкции):
| CV | Значение | ||
|---|---|---|---|
| Automatic decoupling speed | 246 | 16 | range 0 - 255 |
| Automatic decoupling move | 247 | 44 | unit is 0.016 sec * 44 = 0.7 sec |
| Automatic decoupling push | 248 | 15 | unit is 0.016 sec * 15 = 0.24 sec |
И затем изменить настройки работы кнопки F7 на вызов маневра расцепления, а кнопке F9 задать активацию AUX5, который не используется дла того, что бы один выход не активировался двумя кнопками (см. страницы 60 и 61):
| CV | Значение | ||
|---|---|---|---|
| Index register | 32 | 3 | |
| Row 10 Control CV A | 401 | 4 | |
| Row 10 Control CV C | 403 | 4 | Key F7 is On = 4, это по идее уже есть там |
| Row 12 Control CV C | 467 | 64 | Key F9 is On = 64, нужно проверить что это там |
| Index register | 32 | 8 | |
| Row 10 Control CV K | 401 | 0 | Output AUX5 On = 64, это было там в оригинале |
| Row 10 Control CV L | 402 | 1 | Output AUX7 On = 1 |
| Row 10 Control CV N | 404 | 64 | Uncoupling cycle = 64 |
| Row 12 Control CV K | 433 | 64 | Output AUX5 On = 64 |
| Row 12 Control CV L | 434 | 0 | Output AUX7 On = 1, это было там в оригинале |
Я меняю значения в 10 и 12 рядах, это отличается от информации в таблице "Function Mapping Chart" со стр. 58 инструкции, нужные ряды были найдены опытным путем.
Снова не получится использовать условие "если локомотив остановлен" (зачеркнуто в таблице), которое ломает выполнение "маневрового танго".
Эффект топки
Завершающим этапом я настроил выход AUX4 на режим "интеллектуальной топки", в котором интенсивность эффекта будет зависеть от скорости движения, см. "12.5.1. Available lighting effects" на странице 66. Кроме ручного включения по кнопке F6 я добавил автоматизацию, чтоб топка светилась во время движения (см. таблицу на стр. 58):
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Index register | 32 | 0 | 12.2.1. Index CV access, стр. 56 |
| AUX4 Mode Select CV | 299 | 4 | Firebox = 3, Intelligent firebox = 4 |
| AUX4 Brightness CV | 302 | 16 | range 0 - 31 |
| Index register | 32 | 4 | |
| Row 24 Control CV A | 369 | 1 | Locomotive drives = 1 |
| Index register | 32 | 9 | |
| Row 24 Control CV K | 369 | 32 | Output AUX4 On = 32 |
Я использовал ряд 24 из "Function Mapping Chart", как первый не занятый функциональными выходами. Описания значений есть в разделе "12.2.2.1. Conditions block" на страницах 60 и 61. В принципе, можно использовать любой другой ряд на выбор из "Default mapping LokPilot 5 Decoder" со стр. 64.
После всего проделанного
В результате все получилось, хоть я и не совсем доволен. Сначала о негативном. Попытка сделать спереди красивую декоративную сцепку провалилась. Видимо, декоративные накладные можно ставить только при эксплуатации на больших радиусах, неспроста на официальном cайте написано, что минимальный радиус 422 мм. (R2).
Похоже, после установки электромагнитной сцепки, а точнее, прокладывания проводов между корпусом и задней тележкой, модель стала более склонна к вывешиванию на тележках, не смотря на то, что провода у сцепки сверх тонкие. Но по-другому скрытно проложить провода там просто нет возможности.
После замены декодера Lenz Silver+ на ESU LokPilot 5, ход модели и изменился и стал похож на Piko 52440. Опять закралась мысль, что вроде едет хорошо, но звук не нравится, что если надо было все таки удалить конденсатор C4, пока плата была в руках... С этой мыслью, видимо, мне еще долго предстоит мириться, поскольку повторять опыт доставания платы я совсем не хочу. Да и в декодере есть еще масса настроек, которые можно покрутить, чтоб что-то улучшилось.
Ну а теперь о хорошем, оно немного ушло на второй план, поскольку процесс вышел более трудоемким, чем с Piko 52440. Расцепление с кнопки работает прекрасно, настройки удалось быстро подобрать на основе предыдущего опыта, и вышло как будто так оно и должно было быть. Участие модели в макетной жизни резко повысилось, паровоз стал более играбельным. Да, уже нет такого вау-эффекта, как от Piko 52440, но у меня получилась еще одна модель с очень интересным функционалом. Теперь можно подумать об изначальном алгоритме автоматического движения пассажирского поезда, который оставляет вагоны на станции и уходит в депо, но уже без использования подмакетных расцепителей.
И последнее, приятные мелочи. Наконец в модели полноценно работает топка. И меня теперь не раздражает бестолковая передняя сцепка, надеюсь со временем удастся что-то придумать, вроде декоративной сцепки для NEM-шахты.
P.S.
Я еще раз проникся сцепками "роко универсальная" (Roco 40397), помимо того, что они легко сцепляются-расцепляются и надежно держат, при их использовании расстояние между вагонами заметно уменьшается и состав выглядит более натурально.
P.P.S.
После того, как я решил делать управление моделями в едином стиле, пришлось еще раз перепрограммировать декодер, чтоб привести к целевой схеме:
| Кнопка | Было | Стало |
|---|---|---|
| F0 | Свет по ходу движения | Свет по ходу движения, плавное включение, красный сзади (AUX1, AUX2) |
| F1 | Красный сзади (AUX1) | Свет в кабине, эффект лампы (AUX3) |
| F2 | Красный спереди (AUX2) | Топка (AUX4) |
| F3 | Маневровый режим | — |
| F4 | Отключить задержку разгона/торможения | Маневровый режим |
| F5 | Свет в кабине (AUX3) | Сцепка сзади (AUX7) |
| F6 | Топка (AUX4) | AUX8 |
| F7 | Сцепка сзади (AUX7) | Альтернативный свет по ходу, без красных (AUX1, AUX2) |
| F8 | AUX6 | Только красные сзади (AUX1, AUX2) |
| F9 | AUX5 | Без изменений |
| F10 | AUX8 | Отключить задержку разгона/торможения |
Перенастройка декодера представляет собой изменение световых эффектов для головного света и света в кабине (AUX3), и еще изменение режима на светодиодный для всех выходов, к которым подключено освещение:
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Index register | 32 | 0 | 12.2.1. Index CV access, стр. 56 |
| Light front (Config. 1) Mode Select CV | 259 | 2 | Dimmable light („Fade in/out”) |
| Light front (Config. 1) Special Function CV1 | 263 | 128 | LED Mode = 128 |
| Light back (Config. 1) Mode Select CV | 267 | 2 | Dimmable light („Fade in/out”) |
| Light back (Config. 1) Special Function CV1 | 271 | 128 | LED Mode = 128 |
| AUX3 Mode Select CV | 291 | 1 | Dimmable light |
| AUX3 Special Function CV1 | 295 | 128 | LED Mode = 128 |
| AUX4 Special Function CV1 | 303 | 128 | LED Mode = 128 |
И переназначение функциональных клавиш под новую, теперь стандартную, схему:
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Свет вперед, красный сзади | |||
| Index register | 32 | 3 | |
| Row 1 Control CV A | 257 | 20 | Direction is forward = 4 Key F0 is On = 16 |
| Row 1 Control CV C | 259 | 8 | Key F7 is Off = 8 |
| Index register | 32 | 8 | |
| Row 1 Control CV K | 257 | 5 | Output Headlight On [Conf. 1] = 1 Output AUX1 On [Conf 1.] = 4 |
| Свет назад, красный спереди | |||
| Index register | 32 | 3 | |
| Row 2 Control CV A | 273 | 24 | Direction is reverse = 8 Key F0 is On = 16 |
| Row 2 Control CV C | 275 | 8 | Key F7 is Off = 8 |
| Index register | 32 | 8 | |
| Row 2 Control CV K | 273 | 10 | Output Rearlight On [Conf. 1] = 2 Output AUX2 On [Conf 1.] = 8 |
| Свет вперед без красных сзади по F7 | |||
| Index register | 32 | 3 | |
| Row 3 Control CV A | 289 | 20 | Direction is forward = 4 Key F0 is On = 16 |
| Row 3 Control CV C | 291 | 4 | Key F7 is On = 4 |
| Index register | 32 | 8 | |
| Row 3 Control CV K | 289 | 1 | Output Headlight On [Conf. 1] = 1 |
| Свет назад без красных спереди по F7 | |||
| Index register | 32 | 3 | |
| Row 4 Control CV A | 305 | 24 | Key F1 is On = 64 (проверить, что там это было) Direction is reverse = 8 Key F0 is On = 16 |
| Row 4 Control CV C | 307 | 4 | Key F7 is On = 4 |
| Index register | 32 | 8 | |
| Row 4 Control CV K | 305 | 2 | Output AUX1 On [Conf 1.] = 4 (проверить, что там это было) Output Rearlight On [Conf. 1] = 2 |
| Красный спереди по F8 вместо F2 | |||
| Index register | 32 | 3 | |
| Row 5 Control CV B | 322 | 0 | Key F2 is On = 1 (проверить, что там это было) |
| Row 5 Control CV A | 321 | 8 | Direction is reverse = 8 |
| Row 5 Control CV C | 323 | 16 | Key F8 is On = 16 |
| Index register | 32 | 8 | |
| Row 5 Control CV K | 321 | 8 | Output AUX2 On [Conf 1.] = 8 (проверить, что там это было) |
| Красный сзади по F8 | |||
| Index register | 32 | 3 | |
| Row 11 Control CV A | 417 | 4 | Direction is forward = 4 |
| Row 11 Control CV C | 419 | 16 | Key F8 is On = 16 (проверить, что там это было) |
| Index register | 32 | 8 | |
| Row 11 Control CV K | 417 | 4 | Output AUX6 On = 128 (проверить, что там это было) Output AUX1 On [Conf 1.] = 4 |
| Маневровый режим по F4 вместо F3 | |||
| Index register | 32 | 3 | |
| Row 6 Control CV B | 338 | 16 | Key F3 is On = 4 (проверить, что там это было) Key F4 is On = 16 |
| Отключить задержки по F10 вместо F4 | |||
| Index register | 32 | 3 | |
| Row 7 Control CV B | 354 | 0 | Key F4 is On = 16 (проверить, что там это было) |
| Row 7 Control CV D | 356 | 1 | Key F10 is On = 1 |
| Свет в кабине по F1 вместо F5 | |||
| Index register | 32 | 3 | |
| Row 8 Control CV B | 370 | 0 | Key F5 is On = 64 (проверить, что там это было) |
| Row 8 Control CV A | 369 | 64 | Key F1 is On = 64 |
| Топка по F2 вместо F6 | |||
| Index register | 32 | 3 | |
| Row 9 Control CV C | 387 | 0 | Key F6 is On = 1 (проверить, что там это было) |
| Row 9 Control CV B | 386 | 1 | Key F2 is On = 1 |
| Сцепка сзади по F5 вместо F7 | |||
| Index register | 32 | 3 | |
| Row 10 Control CV C | 403 | 0 | Key F7 is On = 4 (проверить, что там это было) |
| Row 10 Control CV B | 402 | 64 | Key F5 is On = 64 |
| AUX8 по F6 вместо F10 | |||
| Index register | 32 | 3 | |
| Row 13 Control CV D | 452 | 0 | Key F10 is On = 1 (проверить, что там это было) |
| Row 13 Control CV C | 451 | 1 | Key F6 is On = 1 |
Рады в настройках сдвинуты на 3 вверх, относительно того, что написано в инструкции на стр.64.