Piko 52440 Diesellok D.141 FS IV

Невероятные приключения итальянца в России! Это еще один локомотив, который был куплен просто потому, что понравился, не взирая на приписку к FS. А поскольку он маневровый, то был так же приобретен комплект электромагнитных цифровых сцепок ESU 41002. Таким образом я попробую сделать крутую модель за недорого.
В очередной раз радуюсь тому, что можно купить хорошую модель в минимальной комплектации и дооснастить только тем, что надо, не переплачивая, например, за не нужный мне звук. И кстати, на месте динамика тут стоит дополнительный груз, что делает ходовые характеристики чуточку лучше, чем у модели со звуком. Но, справедливости ради, надо отметить, что экспортная цена модели скаканула со 142€ до 238€ за время от покупки до доставки. Сейчас сижу и немного жалею, что не взял две  Моделька быстро превратилась в не самую дешевую.
Моделька быстро превратилась в не самую дешевую.
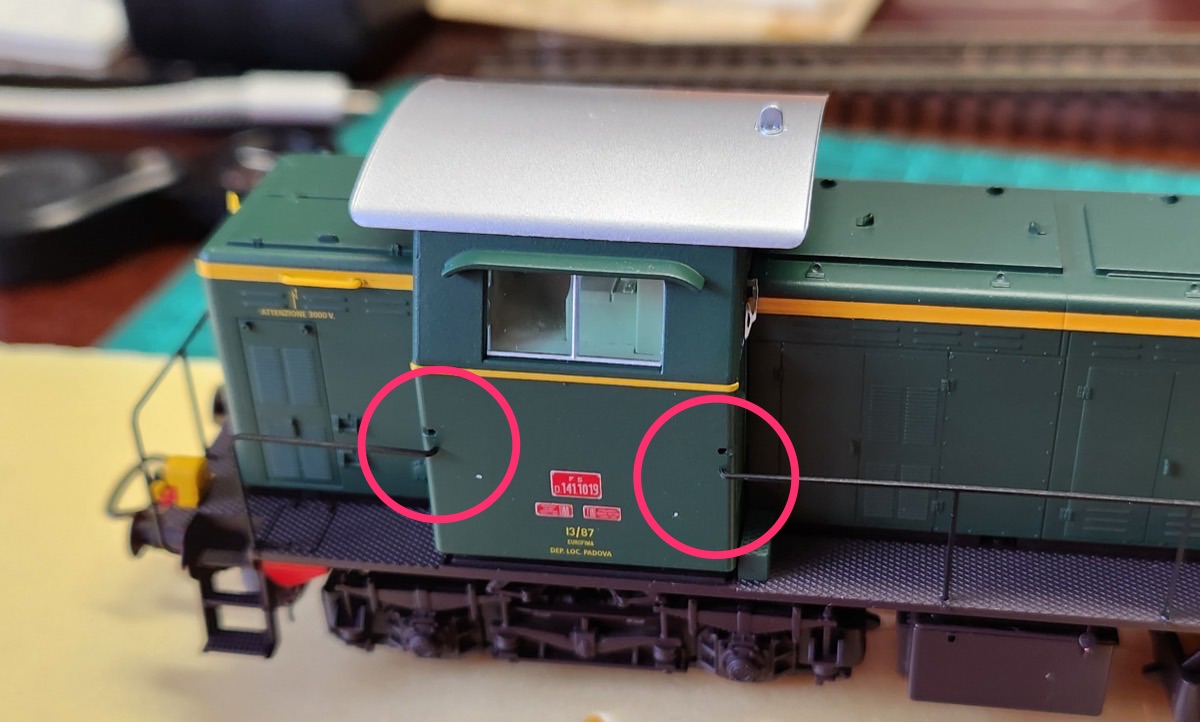
Именно эта модель была выбрана из всей серии за черные поручни и минимум желтого на кузове. А всего в таком кузове я насчитал 8 моделей для постоянного тока, артикулы: 52440, 52440, 52447, 52449, 52450, 52451, 52452, 55912; которые отличаются окрасом, наличием звука и декодера, и последний, expert plus еще и с автоматическими сцепками.
В комплекте есть накладные детали, если захочется выкинуть сцепки или сделать модель стендовой. Но это не наш случай.
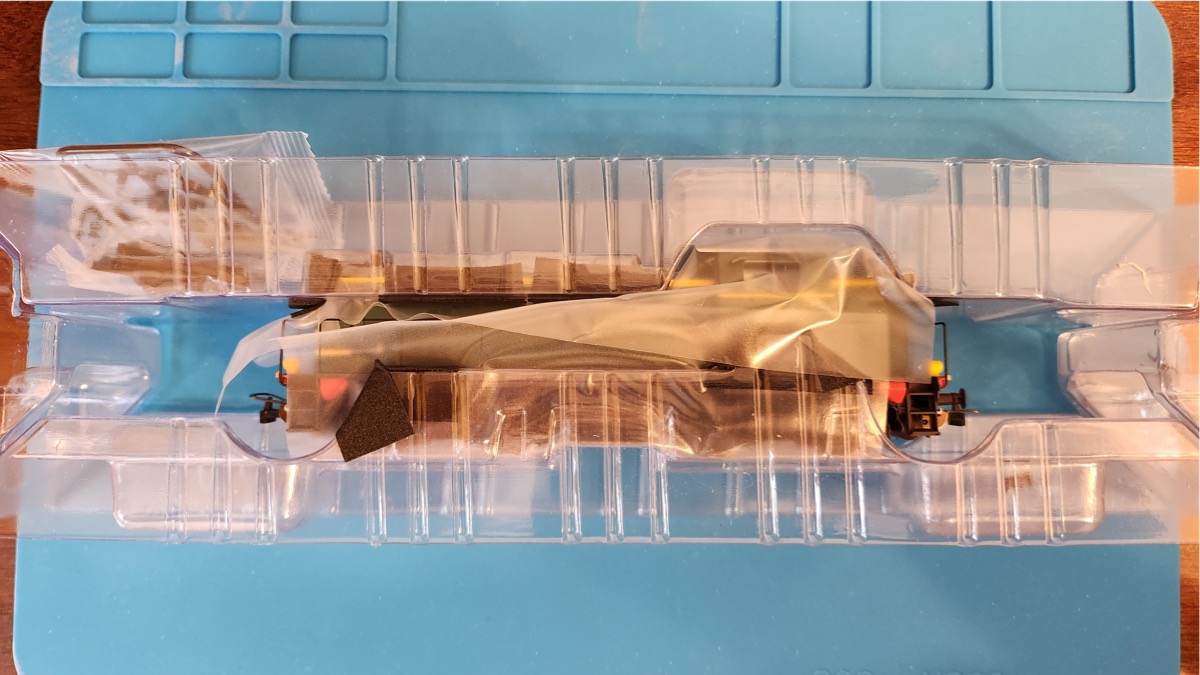
Упаковка вполне соответствует линейке Expert и сохранила модель в целости на пути из Германии через почту. Точнее почти в целости, один буфер все же отвалился за время пути, но поскольку он держится на трении, то был легко восстановлен.

Сама модель смотрится восхитительно благодаря прекрасной проработке деталей, не даром столько внимания этому уделили в рекламном ролике.
Возможности освещения стандартные: белый/красный по ходу движения, освещение в кабине. Но мне хочется обратить внимание на наличие отдельно включаемой подсветки панели приборов в кабине машиниста. Она почти незаметна при эксплуатации модели, видна лишь при пристальном разглядывании, но именно такие мелочи и отличают модели expert от hobby.

Взяв в руки модель ощущается неожиданно тяжелой, но аккуратно взять ее не так просто из-за поручней и других мелких деталей. Внутри установлен 5-полюсный мотор, так и должно быть, ничего необычного, но это камень в огород Roco и других производителей, которые стали ставить в свои новые модели 3-полюсные моторы.
Вскрытие модели
На картинке из инструкции модель разбирается несложно, нужно вывернуть 2 винта под кабиной:
А затем немного отвести поручни в сторону от кабины и снять кузов вверх:
Но на практике все не так просто. Вывернув винты, корпус и не думает сдвигаться с места. Мне удалось его подцепить только с передней стороны локомотива. Для этого пригодился пластиковый инструмент для разбора мобильников с али.

Ставить корпус назад тоже будет непросто, с усилием и осторожно. Поручни, по ощущениям, сделаны из пластика, достаточно прочные и упругие, но, похоже, приклеены к платформе, немного за них подергав, я смирился с тем, что они останутся и буду вечно мешать далее в процессе.
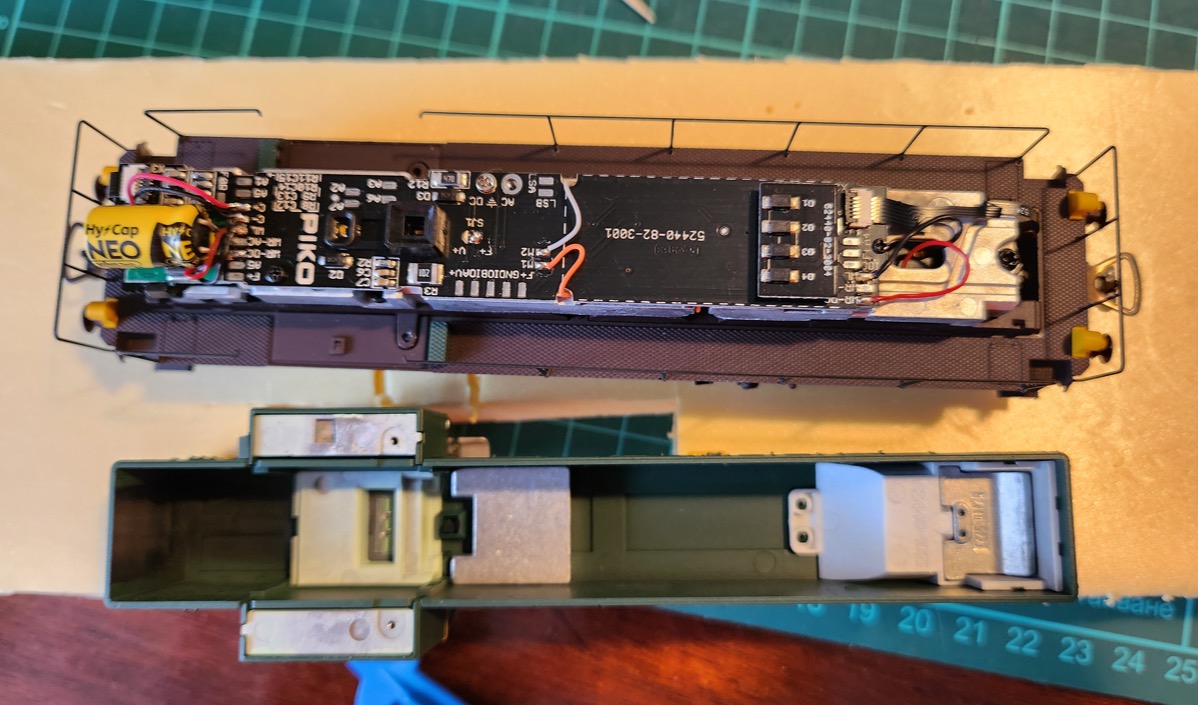
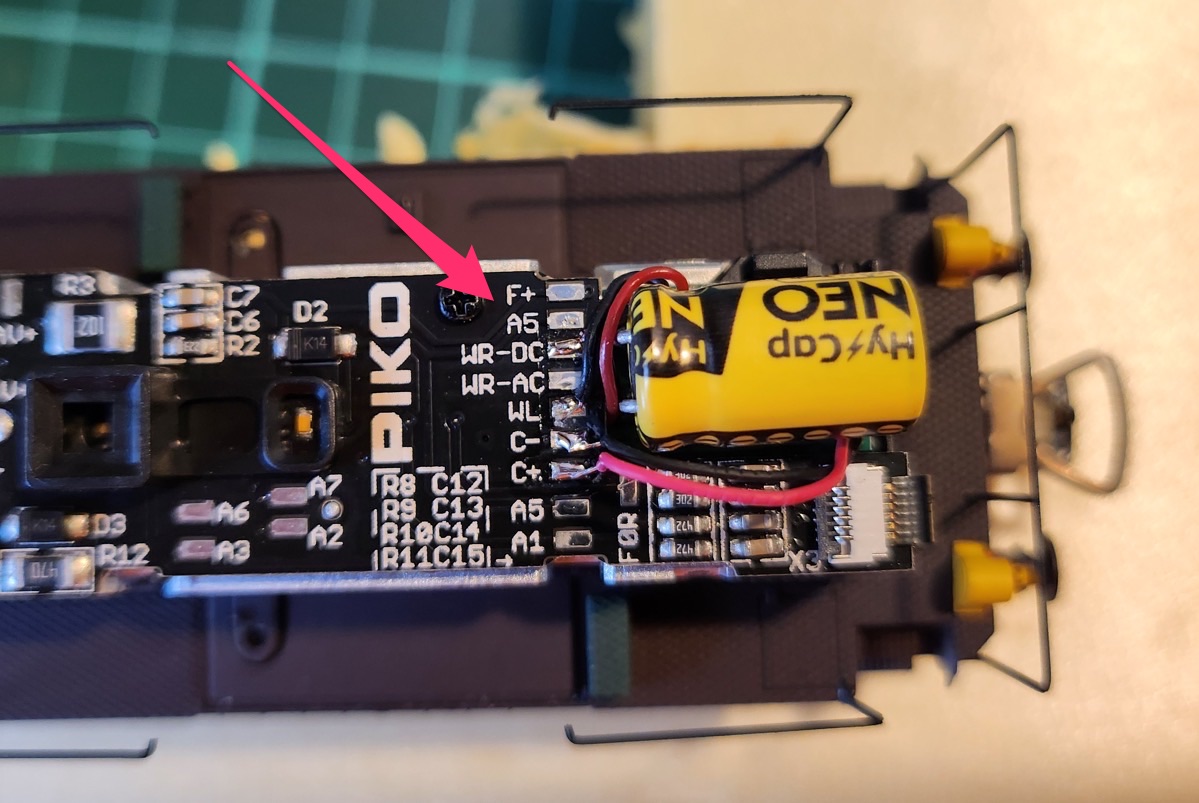
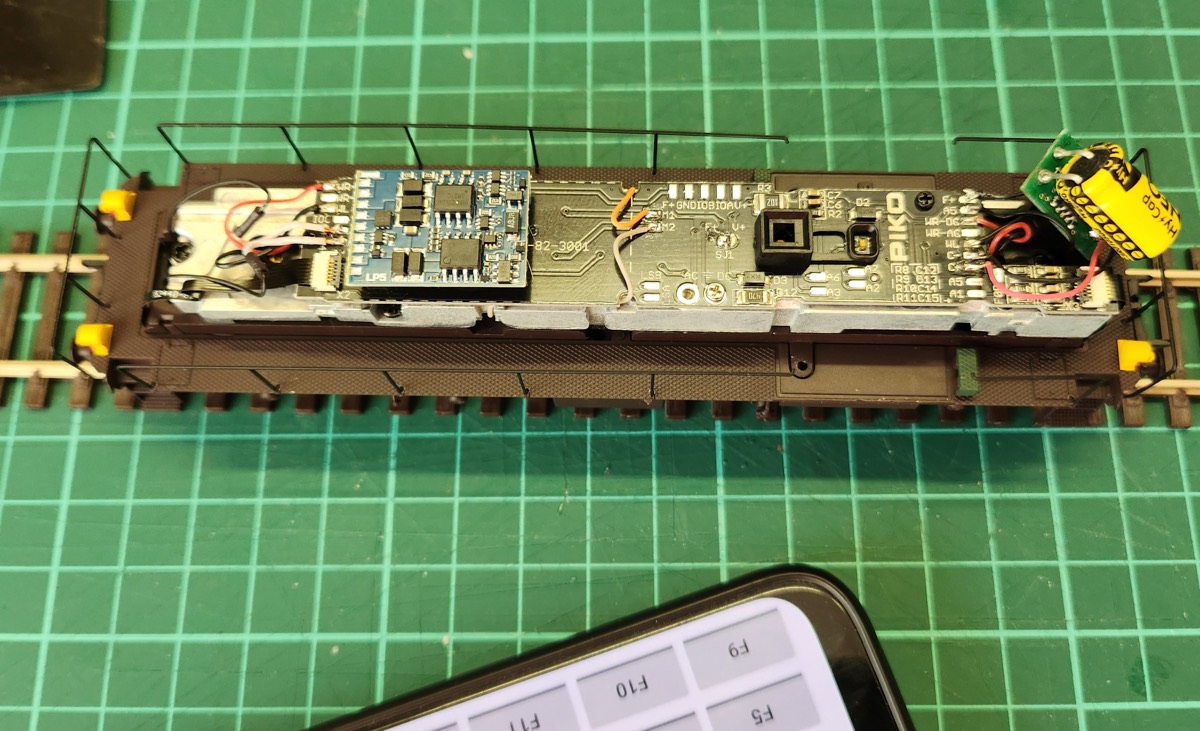
В самом корпусе, кстати, тоже есть грузы для увеличения массы локомотива. А под корпусом приятно радует наличие пауэр-пака: ионистор 3V 1F и контроллер к нему.
Установка декодера
Далее в тексте периодически будут отсылки к страницам инструкции для декодера ESU LokPilot 5, которую можно скачать отсюда.
Для декодера на плате предусмотрен разъем Plux22, в котором изначально стоит заглушка для работы модели в аналоге. Ее нужно вынуть и на ее место вставить декодер.
Под управлением декодера ESU LokPilot 5 локомотив нормально поехал, но все же пришлось внести настройки для пиковского мотора из инструкции к декодеру со страницы 53:
| CV2 | CV9 | CV51 | CV52 | CV53 | CV54 | CV55 | CV56 | CV116 | CV117 | CV118 | CV119 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PIKO® 5-Pol Motors (new Motor) | 3 | 25 | 15 | 20 | 110 | 30 | 40 | 220 | 50 | 100 | 10 | 25 |
| Результат авто калибровки | 16 | 6 | 84 | 32 | 25 |
После рекомендуемых настроек модель стала ехать значительно лучше, но все равно решил провести авто-калибровку мотора со страницы 55. Для начала калибровки нужно записать CV54=0 и нажать F1 на пульте, модель проедет почти 1 метр на полной скорости и сама себе запишет нужные значения в CV51-55. Перед началом надо убедится, что выбрано правильное направление движения и впереди есть достаточный участок пути. После автоматической калибровки стало еще лучше, практически идеально.
Что-ж, мделька явно не plug-n-play, а ведь впереди еще самое интересное...
Электромагнитные сцепки
Немного теории о том, как работает электромагнитная сцепка. При подаче напряжения электромагнитная катушка поднимет кронштейн и локомотив может отъехать, оставив состав стоять. Но поскольку провода, которыми намотана катушка внутри сцепки, крайне тонкие, то после включения она достаточно быстро сгорает (условно за 5 секунд). Чтоб сберечь катушку, ее включают на короткое время на полную мощность, чтоб механизм сдвинулся, а затем при помощи ШИМ, снижают мощность до минимально достаточной для поддержания сцепки открытой. В таком режиме катушка живет значительно дольше.
Так же рекомендуется использовать маневр расцепления, который могут автоматически выполнить большинство современных декодеров, чтоб не дожидаться пока человек накрутит что надо на пульте управления. Маневр заключается в том, что сначала локомотив сдает немного назад, чтоб снять натяжение в сцепках, которое может препятствовать расцеплению, затем включает сцепку и немного проезжает вперед, отцепляясь от состава. Автоматика удобна и нужна чтоб выполнить все действия за минимальное время и двигаться на строго определенные расстояния.
Физическое подключение сцепок
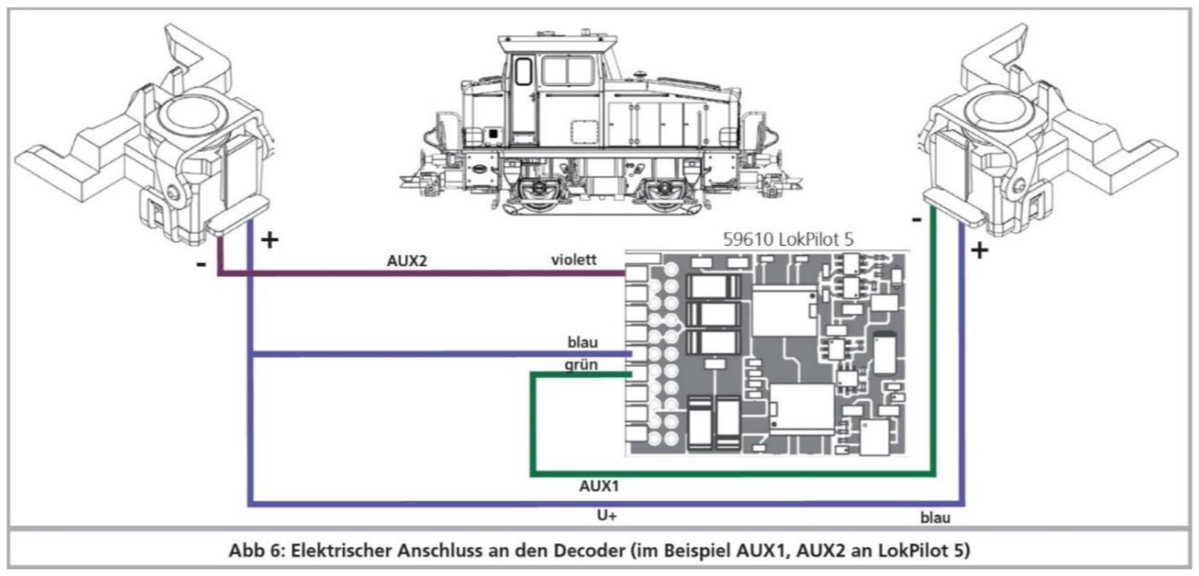
На практике при подключении к декодеру нужно соблюдать полярность, чтоб при активации сцепка толкала кронштейн вверх, а не пыталась прижимать вниз. В общем случае "+" сцепки подключаем к общему "U+" декодера, а "-" к нужному функциональному выходу AUX.
Мне повезло, поскольку существует исполнение модели с электромагнитными сцепками (артикул 55912), поэтому внутри на плате есть подготовка для подключения сцепок в виде контактных площадок. Для первого опыта установки электро-сцепок это то, что надо.
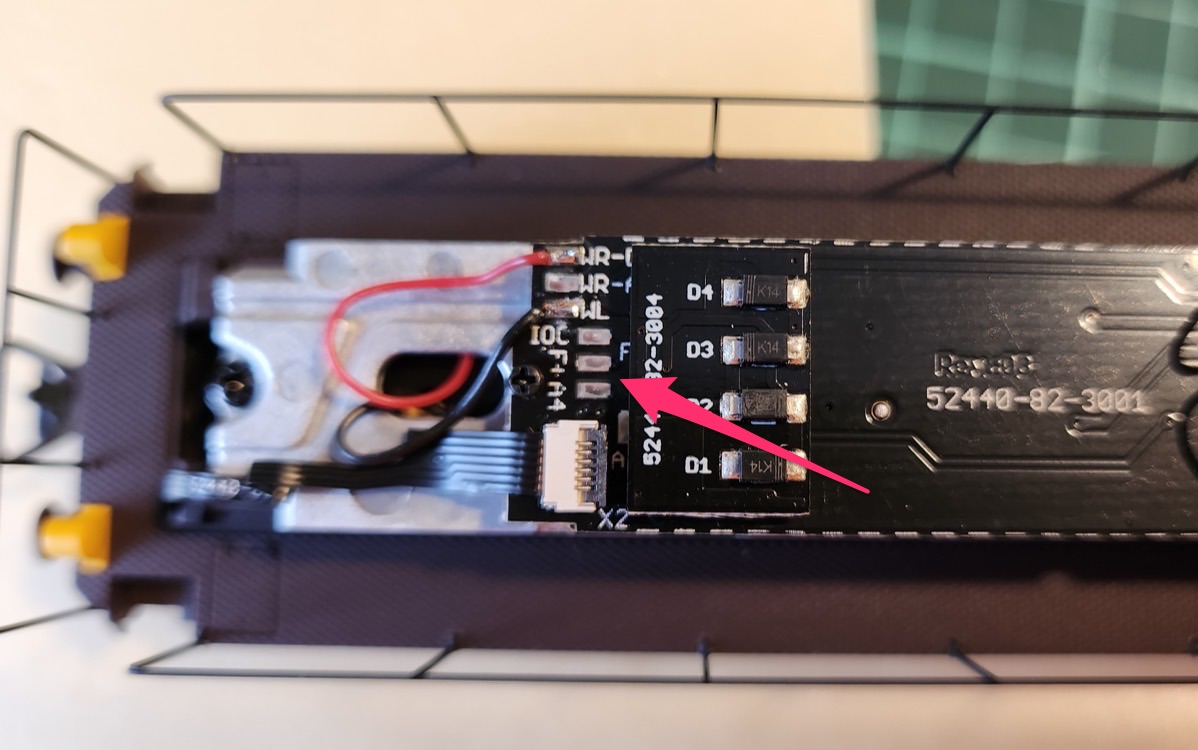
Поскольку у сцепок ESU 41002 оба провода черные, то один стоит разметить, чтоб не перепутать при подключении. Сами провода производитель предлагает пропускать через NEM-шахту, там для них предусмотрено специальное место.
Не смотря на всю эту подготовку, установить сцепки с проводами, а затем провести провода до платы совсем непросто. И, конечно, очень мешают поручни. Наверное, если разобрать все до основания и снять телеги, было бы проще возиться со сцепками, но я счел, что трудозатраты на разобрать-собрать всю модель будут все же больше, чем исхитриться и все сделать не разбирая.
На динамическом механизме сцепки предусмотрены маленькие держатели (вроде как) для проводов от электросцепок, но провода ESU 41002 оказались слишком толстыми для них.

Прокладка проводов от задней сцепки прошла без проблем. Под ионистором оказалось отверстие около винта, через которое провода дотянулись до платы с небольшим запасом. А вот с передней сцепкой вышла незадача: не смотря на примерку до установки, длины проводов до платы не хватило буквально на 1-2 мм., пришлось наращивать прямо на модели.
При всей простоте описанного, на возню со со сцепками и проводами ушло несколько часов. После этого модель в стиле "кишки наружу" была поставлена на рельсы и подключена к тестовой станции для программирования.
Сами сцепки могут быть отрегулированы по высоте для корректной работы автоматического расцепления. Процесс этот тоже не очень приятный т.к. к маленькой сцепке нужно прикладывать достаточно большое усилие и лучше при этом придерживать шахту или то, во что она упирается. Конечно же, при этом опять мешают поручни.
Настройка декодера
Настройки декодера я буду рассматривать относительно ESU LokPilot 5, который был приобретен как рекомендуемый производителем сцепок, на других декодерах принципы будут те же, но конкретные действия будут сильно зависеть о конкретного декодера.
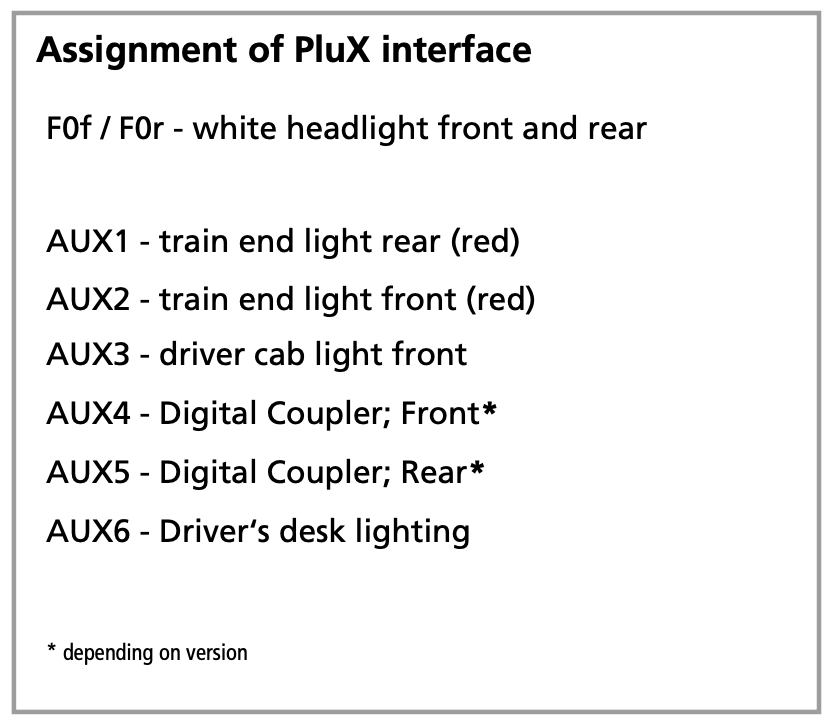
В моем локомотиве для управления сцепками зарезервированы выходы AUX4 и AUX5. Сначала на декодере нужно настроить параметры этих выходов на управление электромагнитными сцепками.
Для конфигурации AUX4 обращаемся к инструкции стр. 65 и находим необходимые CV для него: Mode Select CV - 299, Switching-On/-Off Delay - 300, Automatic Switch Off - 301, Brightness CV - 302. Для AUX5 аналогично - 307, 308, 309, 310.
Далее нужно записать значения в эти CV согласно таблице:
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Index register | 32 | 0 | 12.2.1. Index CV access, стр. 56 |
| AUX4 Mode Select CV | 299 | 33 | Autocoupler coil#2 |
| AUX4 Switching-On/-Off Delay | 300 | 2 | Range 0-15, Time 0-6,144 sec |
| AUX4 Automatic Switch Off | 301 | 4 | unit is 0.4 sec * 5 = 2.0 seс |
| AUX4 Brightness CV | 302 | 16 | range 0 - 31 |
| AUX5 Mode Select CV | 307 | 33 | Autocoupler coil#2 |
| AUX5 Switching-On/-Off Delay | 308 | 2 | Range 0-15, Time 0-6,144 sec |
| AUX5 Automatic Switch Off | 309 | 4 | unit is 0.4 sec * 5 = 2.0 seс |
| AUX5 Brightness CV | 310 | 16 | range 0 - 31 |
Значение для Mode Select CV равное 33 (Autocoupler coil#2) нет в документации, взято из LokProgrammer и еще одной неофициальной инструкции. О проблеме в документации я написал в саппорт ESU, но не жду, что они скоро ответят.
Я использую задержку в Switching-On/-Off Delay для того, чтоб сцепка не включалась сразу при толкании в рамках маневра расцепления, это чуть-чуть снизит ее износ. В ручном режиме это не имеет смысла.
Теперь можно проверить работу сцепок кнопками F6 и F7, согласно "Default mapping LokPilot 5 Decoder" на странице 64. Будьте готовы сразу убрать модель с рельсов, чтоб не спалить сцепки, если что-то пойдет не так.
Когда в ручном режиме все работает, нужно настроить параметры маневра расцепления, для того, чтоб его можно было использовать. За "маневровое танго" отвечают следующие параметры (см. стр. 83):
| CV | Значение | ||
|---|---|---|---|
| Automatic decoupling speed | 246 | 16 | range 0 - 255 |
| Automatic decoupling move | 247 | 64 | unit is 0.016 sec * 64 = 1.02 sec |
| Automatic decoupling push | 248 | 16 | unit is 0.016 sec * 16 = 0.26 sec |
Визуально продолжительность движения и толкания выглядит больше расчетных и близка 2 и 0.5 секунд соответственно, возможно это связано со скоростью и коэффициентами разгона и торможения из настроек мотора.
Затем нужно заменить действия на кнопках F6 и F7 на выполнение маневра расцепления в нужную сторону. Для этого потребуется таблица "Function Mapping Chart" со стр. 58, в которой будем заменять значения для рядов 9 и 10. Не смотря на информацию на стр. 64, за кнопки F6 и F7 отвечают именно ряды 9 и 10 соответственно, они были найдены опытным путем. Нужно записать CV согласно таблице:
| CV | Значение | ||
|---|---|---|---|
| Index register | 32 | 3 | |
| Row 9 Control CV A | 385 | 8 | |
| Row 9 Control CV C | 387 | 1 | Key F6 is On = 1, это по идее уже есть там |
| Index register | 32 | 8 | |
| Row 9 Control CV K | 385 | 32 | Output AUX4 On = 32, это по идее уже есть там |
| Row 9 Control CV N | 388 | 64 | Uncoupling cycle = 64 |
| Index register | 32 | 3 | |
| Row 10 Control CV A | 401 | 4 | |
| Row 10 Control CV C | 403 | 4 | Key F7 is On = 4, это по идее уже есть там |
| Index register | 32 | 8 | |
| Row 10 Control CV K | 401 | 64 | Output AUX5 On = 64, это по идее уже есть там |
| Row 10 Control CV N | 404 | 64 | Uncoupling cycle = 64 |
Пояснения по значениям CV можно посмотреть в разделе "12.2.2.1. Conditions block" на стр. 60 и "12.2.2.2. Physical function outputs" на стр. 61 в инструкции. Зачеркнутые значения, которые должны были позволять выполнять маневр только когда локомотив не движется, по факту оказались не рабочими и их наличие ломало выполнение маневра. К сожалению, придется без них.
На всякий случай небольшая шпаргалка об аппаратно-программном:
| Выход декодера | Сцепка | Кнопка | Ряд в настройках |
|---|---|---|---|
| AUX4 | Передняя | F6 | 9 |
| AUX5 | Задняя | F7 | 10 |
В целом, тут можно сделать и как у классически моделей ESU - расцепление одной кнопкой, в зависимости от направления движения, но мне больше нравится, чтоб когда модель "смотрит" не в ту сторону, попытки расцепления не происходило.
И еще немного автоматики
В качестве вишенки на торте. Выше я писал, что у локомотива есть функция подсветки приборов в кабине, выведенная на AUX6 и кнопку F8 по-умолчанию. Поскольку, без пристального внимания к модели, эта подсветка не очень заметна, то она скорее всего будет мало востребована при эксплуатации и, со временем, вообще забудется вместе с кнопкой ее включения. Поэтому я решил добавить немного магии в модель и сделать так, чтоб подсветка приборов машиниста сама включалась при движении и выключалась при остановке.
Для реализации я буду использовать ряд 24 из "Function Mapping Chart", поскольку он первый не занят функциональными выходами. В принципе, можно использовать любой другой ряд на выбор из "Default mapping LokPilot 5 Decoder" со стр. 64. Итак, согласно таблице на стр. 58, для реализации задуманного мне нужно записать следующие CV:
| CV | Значение | ||
|---|---|---|---|
| Index register | 32 | 4 | |
| Row 24 Control CV A | 369 | 1 | Locomotive drives = 1 |
| Index register | 32 | 9 | |
| Row 24 Control CV K | 369 | 128 | Output AUX6 On = 128 |
Теперь внимательный наблюдатель будет замечать, что в движении локомотив выглядит чуть иначе, и интерес к разглядыванию повысится. А у оператора все так же остается возможность принудительного включения подсветки приборов по кнопке F8.
Результаты и впечатления

Первым делом я поставил на тестовый путь вагончик Piko 54601 с накидной петлей и... расцепления не произошло. Попытки отрегулировать сцепки на локомотиве по высоте не дали результата. Дело в том, что у новопиковской сцепки металл накидной петли магнитится, при включении электромагнитная сцепка локомотива притягивает к себе петлю вагона и расцепление не произойдет никогда.
Предполагая подобное развитие событий, мной была закуплена горстка универсальных сцепок Roco 40397, они немагнитные, сцепляются легче, чем накидная петля и, по отзывам, держат сцепление лучше. Заменив сцепку на вагоне, чудо произошло - локомотив стал прекрасно отцепляться!
Ходовые испытания на макете так же показали отличный результат. Локомотив с вагоном ни разу не расцепился на разных скоростях при прохождении радиусов R1=371 мм. и уклонов 4%, стрелок с отклонением 22.5°, и всего этого вместе взятого. Я, конечно, не гонял на полной скорости через полосу препятствий, но на нормальной, на мой взгляд, скорости все хорошо.

Сама модель так же оставила приятные впечатления, хотя работа мотора и его звук на ходу мне не очень понравился, в отличии от V200 52904, где звук мотора прямо подходит к модели. Автоматическая калибровка двигателя действительно удобная и нужная функция в LokPilot 5, она улучшила ход модели, но звук от мотора ей не подвластен.
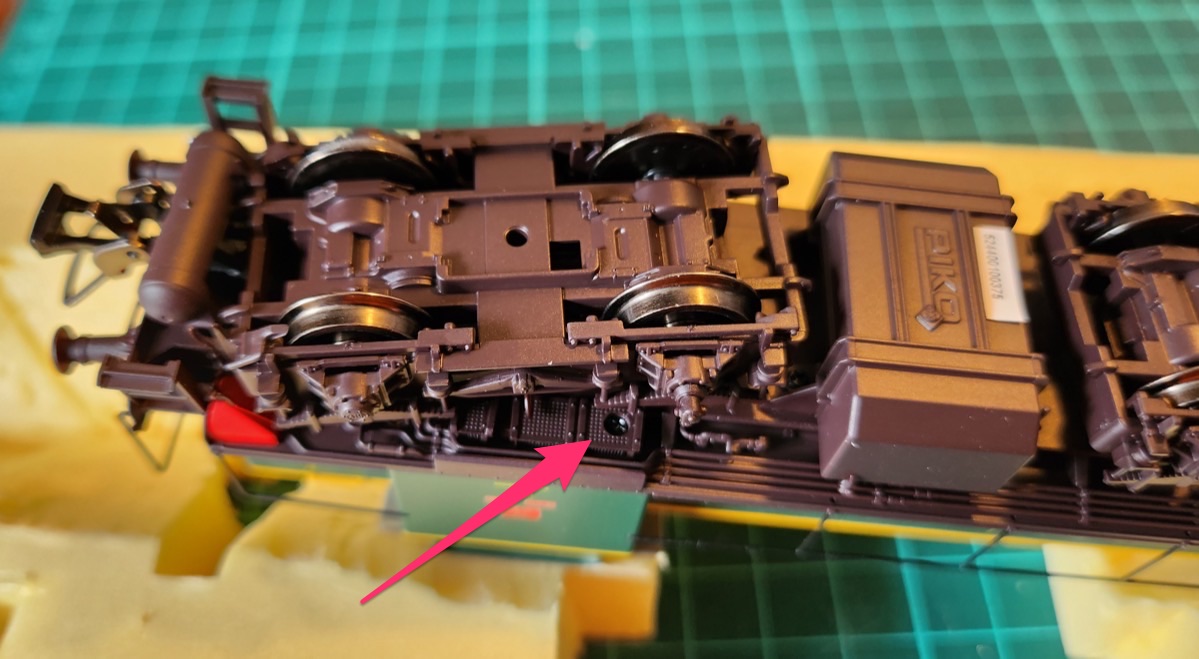
Внешне Piko 52440 выглядит на отлично, детализация и проработка на высшем уровне, чего только стоит трубопровод снизу! Обратная сторона такой детализации - сложность сборки-разбори, обслуживания. Самое неприятное - это, конечно, поручни, которые не получилось снять и они мешаются всегда, даже когда нужно просто схватить модель, чтоб переставить. Но не смотря на это, поручни удивили своей прочностью т.к. пережили верчение модели в руках в процессе установки сцепок.

В результате я очень доволен тем, что получилось. Я не просто пополнил парк локомотивов тем, который мне нравится, я успешно опробовал электромагнитное расцепление с цифровым управлением, и это просто новый уровень жизни. Теперь можно смело поставить жирный крест на механических расцепителях и магнитном расцеплении с кулачковыми сцепками, которые крайне плохо вписываются в подвижной состав с буферами. А самое главное, я получил бесценный опыт, как сделать из обычной модели очень крутую 
Стандартизация управления
Изначально локомотив я настроил, чтоб просто все работало. Спустя время настройки были изменены, чтоб соответствовать моему стандарту управления.
| Кнопка | Было | Стало |
|---|---|---|
| F0 | Свет по ходу движения | Свет по ходу движения, плавное включение, красный сзади (AUX1, AUX2) |
| F1 | Красный сзади (AUX1) | Свет в кабине, эффект лампы (AUX3) |
| F2 | Красный спереди (AUX2) | Подсветки приборов (AUX6) |
| F3 | Маневровый режим | — |
| F4 | Отключить задержку разгона/торможения | Маневровый режим |
| F5 | Свет в кабине (AUX3) | Сцепка сзади (AUX5) |
| F6 | Сцепка спереди (AUX4) | Без изменений |
| F7 | Сцепка сзади (AUX5) | Альтернативный свет по ходу, без красных (AUX1, AUX2) |
| F8 | Подсветки приборов (AUX6) | Только красные сзади (AUX1, AUX2) |
| F9 | AUX7 | Без изменений |
| F10 | AUX8 | Отключить задержку разгона/торможения |
Настройка световых эффектов: плавное включение головного света и эффект энергосберегающей лампы для света в кабине (AUX3). Для подсветки приборов (AUX6) эффектов в голову не пришло, но этот выход также нужно было переключить в режим управления светодиодом.
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Index register | 32 | 0 | 12.2.1. Index CV access, стр. 56 |
| Light front (Config. 1) Mode Select CV | 259 | 2 | Dimmable light („Fade in/out”) |
| Light front (Config. 1) Special Function CV1 | 263 | 128 | LED Mode = 128 |
| Light back (Config. 1) Mode Select CV | 267 | 2 | Dimmable light („Fade in/out”) |
| Light back (Config. 1) Special Function CV1 | 271 | 128 | LED Mode = 128 |
| AUX3 Mode Select CV | 291 | 17 | Energy saving lamp = 17 |
| AUX3 Special Function CV1 | 295 | 128 | LED Mode = 128 |
| AUX6 Special Function CV1 | 319 | 128 | LED Mode = 128 |
Перенастройка функциональных клавиш для целевой схемы управления по моему стандарту:
| CV | Значение | ||
|---|---|---|---|
| Index register | 31 | 16 | 12.2.1. Index CV access, стр. 56 |
| Свет вперед, красный сзади | |||
| Index register | 32 | 3 | |
| Row 1 Control CV A | 257 | 20 | Direction is forward = 4 Key F0 is On = 16 |
| Row 1 Control CV C | 259 | 8 | Key F7 is Off = 8 |
| Index register | 32 | 8 | |
| Row 1 Control CV K | 257 | 5 | Output Headlight On [Conf. 1] = 1 Output AUX1 On [Conf 1.] = 4 |
| Свет назад, красный спереди | |||
| Index register | 32 | 3 | |
| Row 2 Control CV A | 273 | 24 | Direction is reverse = 8 Key F0 is On = 16 |
| Row 2 Control CV C | 275 | 8 | Key F7 is Off = 8 |
| Index register | 32 | 8 | |
| Row 2 Control CV K | 273 | 10 | Output Rearlight On [Conf. 1] = 2 Output AUX2 On [Conf 1.] = 8 |
| Свет вперед без красных сзади по F7 | |||
| Index register | 32 | 3 | |
| Row 3 Control CV A | 289 | 20 | Direction is forward = 4 Key F0 is On = 16 |
| Row 3 Control CV C | 291 | 4 | Key F7 is On = 4 |
| Index register | 32 | 8 | |
| Row 3 Control CV K | 289 | 1 | Output Headlight On [Conf. 1] = 1 |
| Свет назад без красных спереди по F7 | |||
| Index register | 32 | 3 | |
| Row 4 Control CV A | 305 | 24 | Key F1 is On = 64 (проверить, что там это было) Direction is reverse = 8 Key F0 is On = 16 |
| Row 4 Control CV C | 307 | 4 | Key F7 is On = 4 |
| Index register | 32 | 8 | |
| Row 4 Control CV K | 305 | 2 | Output AUX1 On [Conf 1.] = 4 (проверить, что там это было) Output Rearlight On [Conf. 1] = 2 |
| Отключение управления AUX2 по F2 (свободный ряд) | |||
| Index register | 32 | 3 | |
| Row 5 Control CV B | 322 | 0 | Key F2 is On = 1 (проверить, что там это было) |
| Index register | 32 | 8 | |
| Row 5 Control CV K | 321 | 0 | Output AUX2 On [Conf 1.] = 8 (проверить, что там это было) |
| Маневровый режим по F4 вместо F3 | |||
| Index register | 32 | 3 | |
| Row 6 Control CV B | 338 | 16 | Key F3 is On = 4 (проверить, что там это было) Key F4 is On = 16 |
| Отключить задержки по F10 вместо F4 | |||
| Index register | 32 | 3 | |
| Row 7 Control CV B | 354 | 0 | Key F4 is On = 16 (проверить, что там это было) |
| Row 7 Control CV D | 356 | 1 | Key F10 is On = 1 |
| Свет в кабине по F1 вместо F5 | |||
| Index register | 32 | 3 | |
| Row 8 Control CV B | 370 | 0 | Key F5 is On = 64 (проверить, что там это было) |
| Row 8 Control CV A | 369 | 64 | Key F1 is On = 64 |
| Сцепка сзади по F5 вместо F7 | |||
| Index register | 32 | 3 | |
| Row 10 Control CV C | 403 | 0 | Key F7 is On = 4 (проверить, что там это было) |
| Row 10 Control CV B | 402 | 64 | Key F5 is On = 64 |
| Подсветка приборов по F2 вместо F8 | |||
| Index register | 32 | 3 | |
| Row 11 Control CV C | 419 | 0 | Key F8 is On = 16 (проверить, что там это было) |
| Row 11 Control CV B | 418 | 1 | Key F2 is On = 1 |
| Красный спереди по F8 | |||
| Index register | 32 | 3 | |
| Row 12 Control CV C | 435 | 16 | Key F9 is On = 64 (проверить, что там это было) Key F8 is On = 16 |
| Row 12 Control CV A | 433 | 4 | Direction is forward = 4 |
| Index register | 32 | 8 | |
| Row 12 Control CV L | 434 | 0 | Output AUX7 On = 1 (проверить, что там это было) |
| Row 12 Control CV K | 433 | 4 | Output AUX1 On [Conf 1.] = 4 |
| Красный сзади по F8 | |||
| Index register | 32 | 3 | |
| Row 13 Control CV D | 452 | 0 | Key F10 is On = 1 (проверить, что там это было) |
| Row 13 Control CV A | 449 | 8 | Direction is reverse = 8 |
| Row 13 Control CV C | 451 | 16 | Key F8 is On = 16 (проверить, что там это было) |
| Index register | 32 | 8 | |
| Row 13 Control CV L | 450 | 0 | Output AUX8 On = 2 (проверить, что там это было) |
| Row 13 Control CV K | 449 | 8 | Output AUX2 On [Conf 1.] = 8 |
Ряды в настройках сдвинуты на 3 вверх, относительно инструкции стр.64.