Электроника на макете железной дороги

Тема электроники и автоматизации на макете практически безграничная, поэтому для начала нужно определиться с минимумом того, что нужно и что хочется. У меня получился вот такой список:
- Командная станция
- DCC сигнал для управления поездами
- Декодеры для управления стрелками и другими аксессуарами
- Модули обратной связи для понимания состояния
- Разворотная петля
- Освещение строений
- Компьютерное управление
- Видео наблюдение
- Светофоры
Теперь обо всем по порядку.
Командная станция
Часто в понятие "командная станция" вкладывают комплект для управления поездами на макете, состоящий из пульта управления, самой командной станции, бустера и источника питания. Производители часто совмещают в одном корпусе пульт управления и станцию (тогда бустер идет в отдельном корпусе) или станцию и бустер (пульт в отдельном корпусе).
Есть масса вариантов от разных производителей. Цены тоже имеют очень большой разброс. Я выбрал один из самых простых вариантов - проводной комплект Roco MultiMaus, состоящий из пульта-станции Roco 10810, бустера Roco 10764 и источника питания Roco 10725. Выбрал его не только потому, что он уже давно у меня был, а потому, что его возможностей (один пульт управления и не более 80 датчиков обратной связи) мне вполне хватает. Так же мне не нужно ни чтение CV, ни запись CV с адресами более 255. Мне будет вполне достаточно подключения к компьютеру через COM-порт, а не по ЛВС или wi-fi.
Ближайший конкурент Roco z21 start сильно дороже, больше размером, да еще и требует платной разблокировки для работы всех интересных функций, ради которых он сделан. Проводного пульта мне вполне достаточно чтоб порулить самому, а всю автоматику обеспечит компьютер. Возможности поуправлять с телефончика мне тоже не нравится, для тактильных ощущений есть специально для этого созданный пульт, а всякий широкий функционал гораздо удобнее использовать с ноутбука, чем с экрана телефона.
DCC для управления поездами
Изначально благая идея DCC, заключающаяся в управлении несколькими поездами на одних рельсах, терпит полный крах, когда требуется понимать положение поезда и делить макет на участки для автоматизации движения. Вместо того, чтоб приткнуть DCC в одной точке к рельсам, его приходится подключать к каждому участку, а опытные моделисты рекомендуют припаиваться вообще к каждому рельсу, поскольку надеяться на качественный контакт стыков между рельсами не приходится.
Опираясь на написанное выше, под макетом придется пустить DCC-шину, примерно повторяющую форму рельсовой схемы, и организовать отводы от нее к каждому рельсу и стрелке. Существует много мнений о том, какие провода и какого сечения использовать для этого. Я для себя взял за основу материал из DCCWiki.
H0 Bus Length at 5A < 6m 14 AWG (2 мм2) Feeder Wire Length < 1.5M 18 − 22 AWG (0.8 - 0.3 мм2)
Так же будет полезна Таблица перевода сечений кабеля из стандарта AWG в систему СИ. Покопавшись в проводах дома, нашел монтажный провод сечением примерно 0.5 мм2, который как раз подошел под среднее значение выше. Длинна проводов должна быть такая, чтоб хватило для подключения к блокам обратной связи и шине, в моем случае это примерно пол глубины макета (около 40 см.).
Для организации отводов от шины можно просто припаяться к проводам, или купить специальное устройство с клеммной колодкой, или собрать такое устройство самому из монтажной платы, колодок с винтами и куска провода. Из-за неоправданно высокой цены на готовое, мой выбор был сделать самому, выходит несравнимо дешевле, но нужно немного уметь пользоваться паяльником.
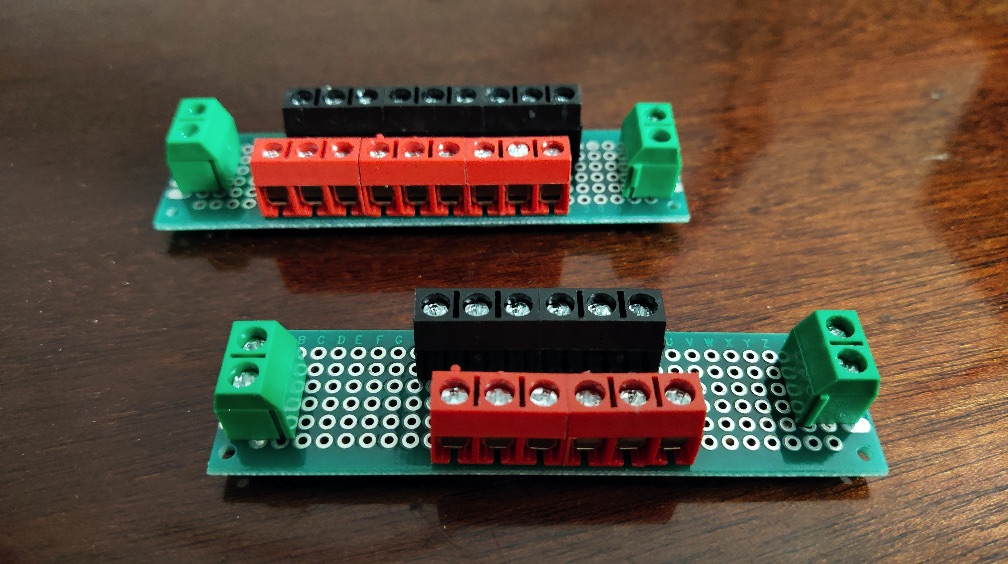
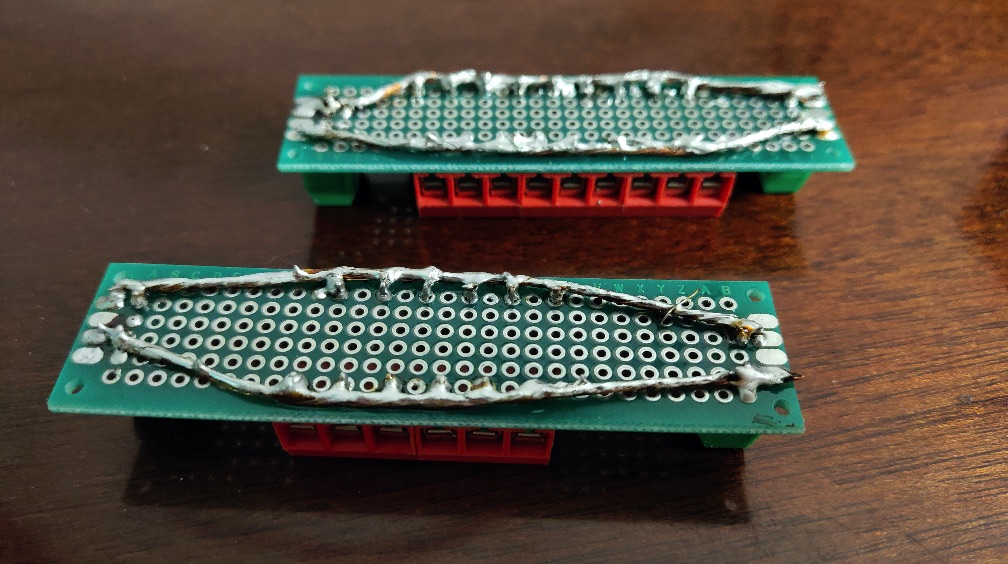
На вид, может быть, не особо красиво и аккуратно, но из-за подмакетного расположения, требования к внешнему виду устройства не предъявляются.
Позднее для более удобного подключения проводов с одной стороны нарисовал и заказал специальные платы.
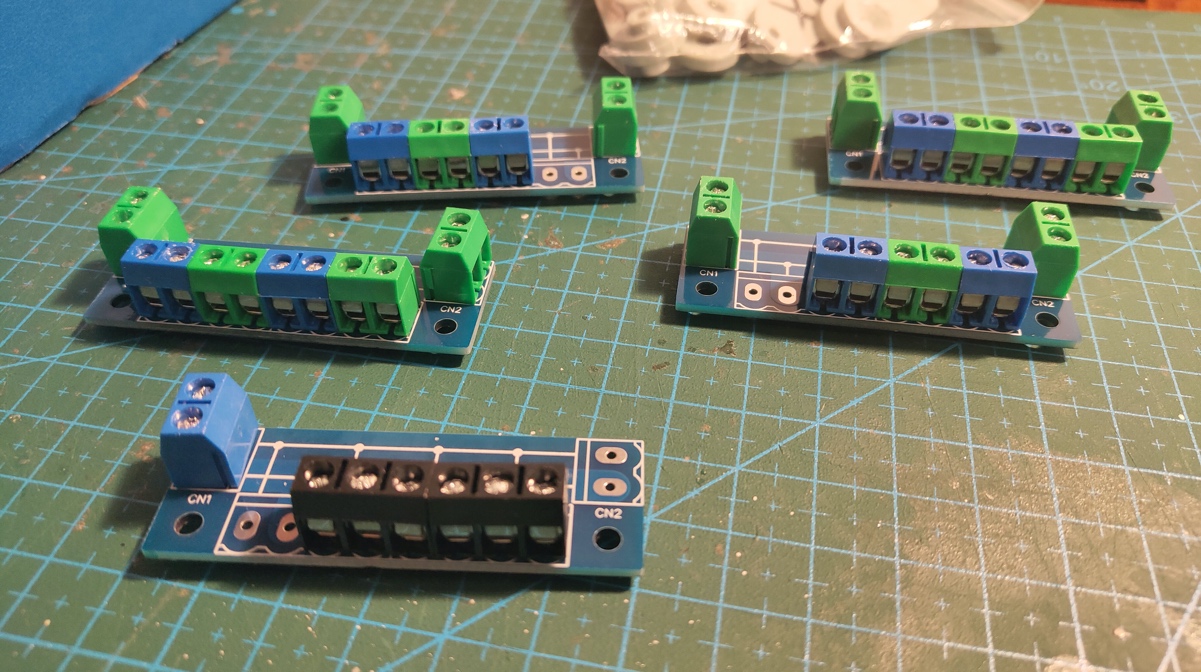
Эти платы так же можно использовать для разведения шины питания аксессуаров и освещения.
Декодеры для управления стрелками
Поскольку я изначально загорелся идеей сделать привод стрелки по-своему, то пришлось самому делать и декодеры. Устройства получились компактные, их легко можно разместить в непосредственной близости от стрелки и DCC-шины. Но поскольку декодер использует внешнее питание, чтоб не использовать энергию из DCC и не ставить дополнительные бустеры, придется так же проложить шину питания рядом с DCC-шиной.
Модули обратной связи
Как я писал выше, автоматическое управление макетом сводит на нет многие преимущества DCC. Если упростить, то управление макетом сводится к пониманию того, какой поезд где находится и какая стрелка в каком положении. Анализируя это состояние программа управления принимает решения, какие команды послать поездам и стрелкам.
Для определения положения поездов макет делится на изолированные участки, каждый из которых подключается через токовый датчик к DCC. Для понимания положения стрелок используются те же самые датчики, только тут мой декодер будет давать сигнал на нужный датчик в зависимости от выполненной команды или данных со своего собственного оптического датчика. Соответственно стрелка занимает аж 3 датчика (2 для положения и 1 для занятости), а обычный участок пути всего 1.
На своем макете я буду использовать аппаратуру Modelldepo, которая сочетает в себе хорошее качество за умеренную цену и очень обширный функционал. Для обратной связи используются модули FB2 или RocoBus2, который помимо обратной связи так же является шлюзом для подключения к компьютеру.
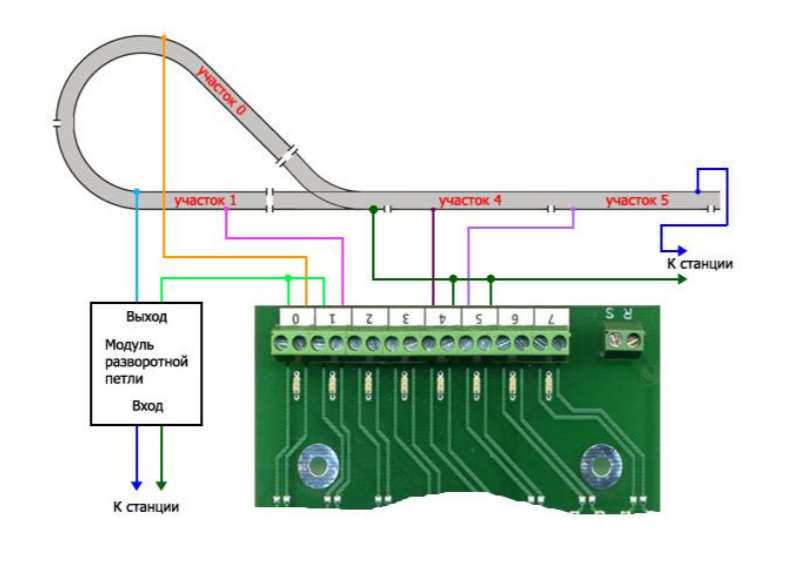
Модуль разворотной петли
Диагональный путь, идущий посередине макета, по сути, является разворотной петлей, когда правый рельс становится левым, а левый - правым, вызывая короткое замыкание. Часть этого пути, идущая по среднему модулю, будет подключена через модуль Super Revercer тоже от Modelldepo. Длинны этого отрезка пути должно хватить, что туда поместился самый длинный состав на макете.
Освещение на макете
Для освещения буду использовать желтые светодиоды. Светодиоды будут закреплены в зданиях, провода от них будут спущены в подмакетное пространство, где через сопротивления на специальных распределительных платах будут подключены к питанию.
Поскольку освещение включается все и разом, то оно будет выведено на отдельную линию питания с коммутацией в районе пульта управления макетом. Эта линия питания будет проходить под местами расположения строений. Для подключения освещения к строениям я разработал специальную плату, которая позволяет организовать отводы от шины к диодам через сопротивления.

По задумке, освещение включается кнопкой принудительно или автоматически, через датчик света, с регулировкой чувствительности на пульте управления. Развитием платы подключения освещения станет контроллер освещения, обеспечивающий динамическое включение/выключение света в определенных знаниях или их частях, когда включается освещение на макете. Например такая концепция очень хорошо подойдет зданию вокзала с большим количеством окон или к жилым домикам.
Компьютерное управление
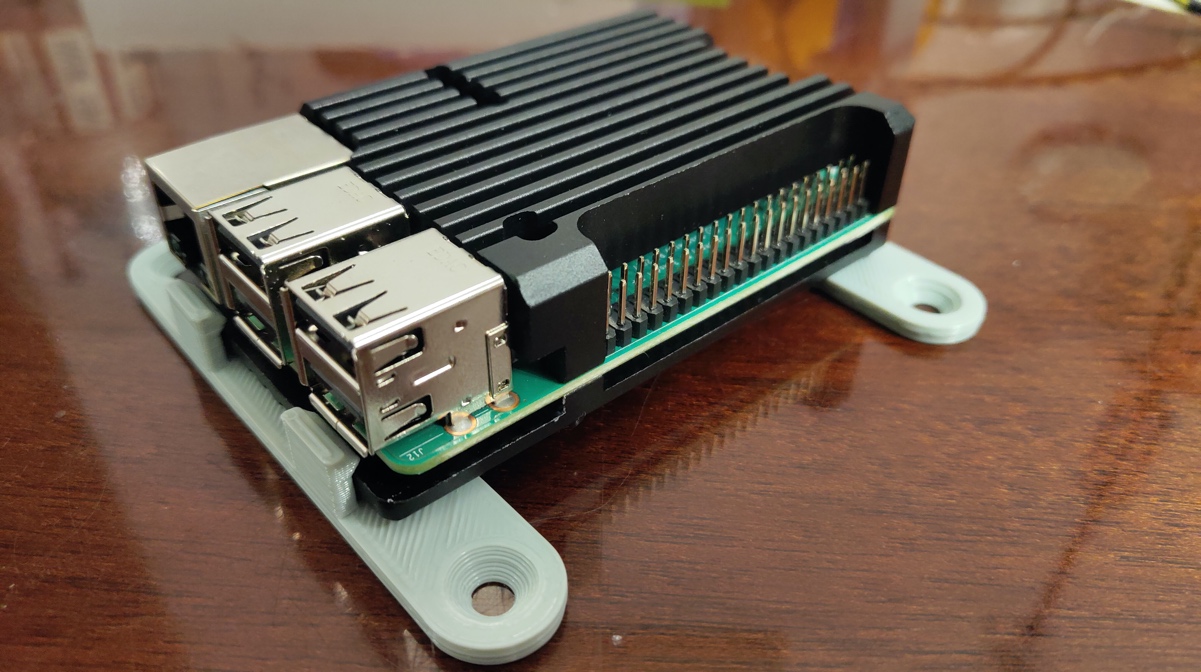
В качестве компьютера был выбран Raspberry pi за свой малый размер и возможность размещения в подмакетном пространстве. Для него был так же приобретен радиатор пассивного охлаждения и сделан специальный крепеж на фото выше.
Управляющая программа - Rocrail, она бесплатная и имеет клиент-серверную архитектуру. Это позволяет держать сервер на raspberry под макетом в непосредственно близости от того, чем он управляет, а клиент может быть где угодно в сети. Более подробно можно прочитать в посте про компьютерное управление и автоматизацию макета.
Видео наблюдение
На первых парах оно будет сделано на основе одной камеры, позже может быть расширено до 4-х. Камера располагается в дальнем от зрителя углу, чтоб можно было посмотреть на макет с другой стороны. Камера подключается к компьютеру, который вещает картинку в сеть. Более подробно можно прочитать в посте про видео наблюдение на макете.
Светофоры
Пока это следующий этап развития, отложим его на потом.
Расчет электропитания
Понимая список того, что будет на макете, нужно придумать и рассчитать то, как это все будет запитано.
Мне понадобится 34 токовых датчика для понимания занятости участков, и еще 24 датчика для положения 10 стрелок и 2 расцепителей. Итого нужно 58 входов FB2, это 8 модулей FB2, точнее 7 FB2 + 1 RocoBus. Для того, чтоб не тащить проводку от датчика к модулю обратной связи через стык модулей, придется добавить еще один FB2. Согласно документации их общее энергопотребление 450мА (50х9). Плюс Модуль разворотной петли Super Revercer, потребление которого не указано, считаем пренебрежимо мало.
На макете планируется одновременное движение не более 3 поездов (а в реальности обычно это будет 1), исходя из характеристик декодера LGR1120 Standart в пике может быть 3.6А (1.2х3). Плюс освещение локомотивов в среднем 2 светодиода по 20 мА, полученные 120мА считаем пренебрежимо малыми. Освещение вагонов пока не планируется, его тоже не учитываем.
Итого пиковое потребление DCC составит около 4А. При условии, что не все поезда будут потреблять те самые 1.2А, то родного бустера ROCO 10764 с трансформатором ROCO 10725 (выход которого обеспечивает 16В и 50ВА или 3,2А с бустера) должно хватить.
Для удобства монтажа трансформатор 10725 можно заменить импульсным блоком питания постоянного тока, например, адаптером от ноутбука или вот таким с напряжением 18В и током 3-4А (мощность 60-70Вт).
Освещение макета будет отдельной линией. Исходя из 4 диодов на каждое из 12 строений плюс неизвестно сколько фонарей, в очень грубом приближении получаем почти 2А (100 диодов по 20мА). Тут блока питания 2А должно хватить.
Другая линия приводы стрелок и расцепителей (10+2) принимаем за 200мА (измеренное значение во время перевода стрелки), и хотя декодер может обеспечить до 800мА, одновременно такой нагрузки не будет, поскольку даже ресет разнесен по времени, плюс часть приводов будет на двойных декодерах где ресет последовательный. Получаем 2.4А.
Питание декодера считаем исходя из этого не более 100мА с периферией. Для расчета берем "плохой" вариант когда будет 10 декодеров (на самом деле меньше тк будут двойные) и получаем дополнительно 1А. Итого 3.5А.
На ту же линию хочется повесить малину с рокрейлом (2,5А) и юсб камерой (не более 500мА исходя из спецификации USB), получаем еще 3А.
Вместе с приводами и декодерами получаем 6.5А. Сюда стоит ставить блок питания 10А, с запасом и учитывая, что цена от 6А не катастрофически отличается.
С точки зрения правильной организации, стоит разнести линии питания приводов стрелок и малины с камерами на отдельные блоки питания для уменьшения их мощности и улучшения безопасности.
Вот такая получилась выкладка: штатное питание из набора рокомыши для DCC (или блок питания 18В/4А), блок питания 5В/2А и блок питания 5В/10А с али.
Подмакетное хозяйство
Вся электроника у меня располагается под макетом и делится на несколько систем, про каждую отдельный пост:
- Силовая часть: расчет, ввод, коммутация и подключение блоков питания;
- Низковольтные линии для подключения освещения и декодеров;
- Система цифрового управления (DCC) и обратной связи.
Стоимость
Комплект командной станции 3.500 руб. когда покупал или 7.000 руб. на момент написания этого поста.
Платы и колодки для отводов от DCC-шины 1.000 руб.
Модули обратной связи и разворотной петли 22.000 руб.
Кабели и разъемы RJ-12 для шины ОС 500 руб.
Raspberry pi, охлаждение и карточка 4.500 руб.
Удлиннитель с разъемом RJ-45 500 руб.
Камера для видео наблюдения 2.000 руб.
Блоки питания 2.000 руб.
Всякие разные клеммы, разъемы, разветвители и прочее для организации кабельного хозяйства 5.000 руб.
Силовые кабели 1.000 руб.
Обжималки для клемм и трубочек 2.000 руб. (это, конечно, инструмент не только для макета, но пришлось купить для удобства постройки)
Платы для подключения освещения 1.500 руб.
Диоды, резисторы и прочая мелочевка для освещения 1.500 руб.
10 микросхем ATtiny13 для контроллера освещения 1.000 руб.
Комплект из 10 плат контроллера освещения 1.000 руб.
На всякий случай, для программирования уже припаянных чипов, заказал еще "прищепку" и программатор, плюс всякой мелочевки на 500 руб.
Платы для организации подключения к шине и платы для контроллера освещения с регулируемой яркостью 1.500 руб.
Еще всякая мелочевка, которая потребовалась в процессе монтажа электроники 2.000 руб.