DCC Step Motor Decoder
Аксессуарный декодер для макета железной дороги
Декодер для управления шаговым двигателем
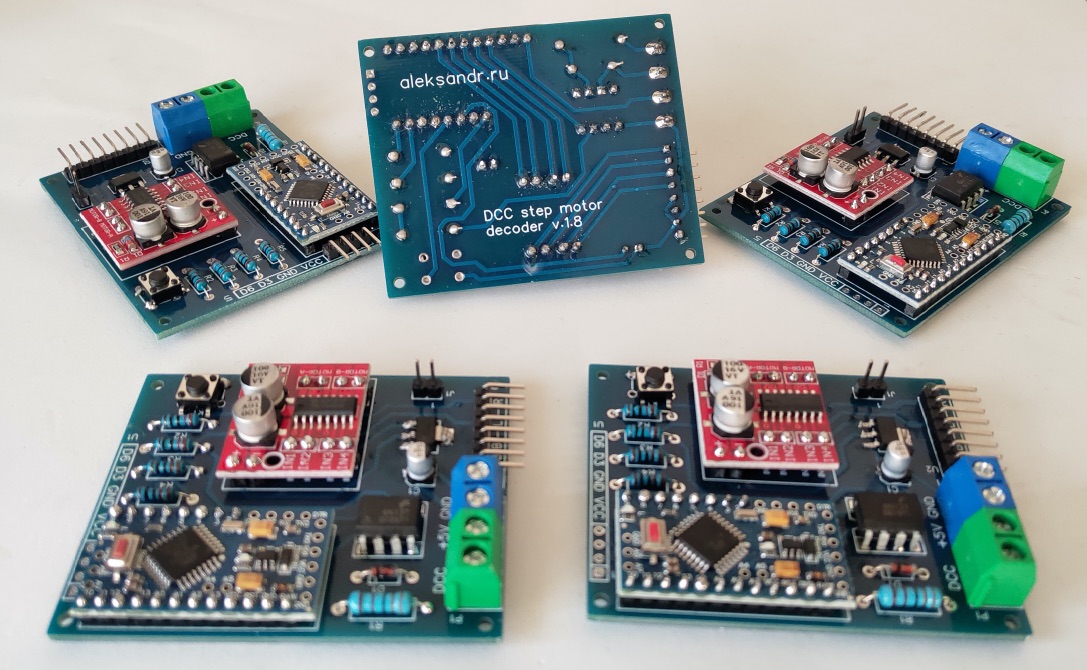
Предназначен для управления одним аксессуаром на основе шагового двигателя в сети DCC, например, приводом стрелки. Декодер подключается к DCC (рельсам) и внешнему питанию 5-12В постоянного тока. Имеет выход для 4-полюсного шагового мотора с напряжением 3.3В и током до 800мА, и выходы-индикаторы положения.
Декодер начинает работу с отображения своего адреса вспышками светодиода на плате (количество вспышек равно последней цифре адреса). Это позволяет не только идентифицировать декодер, но и разнести во времени процесс инициализации при подаче питания на большое количество декодеров.
Процесс инициализации (ресет) заключается в переводе шагового двигателя в крайнее положение. Это позволяет получить заранее известное положение при начале работы и в случае потери питания в момент движения мотора. Инициализация может быть принудительной, когда двигатель всегда переводится в настроенное положение, или опциональный, когда перевод осуществляется на основе последней сохраненной позиции в памяти.
У декодера предусмотрены гибкие настройки, позволяющие адаптировать функционал под любые цели. Настройки хранятся в CV и могут быть изменены в режиме программирования. Режим программирования включается замыканием джампера J1 на плате.
| CV | Назначение | По-умолчанию | Диапазон | Пояснение |
|---|---|---|---|---|
| CV1 | Адрес декодера | 5 | 1...254 | |
| CV2 | Roco адресация | 1 | 0-1 | Смещение адреса на 4 |
| СV3 | Кол-во шагов | 45 | 1...254 | Мотор двигается на х10 |
| CV4 | Скорость | 30 | 1...254 | Скорость вращения |
| CV5 | Режим инициализации | 0 | 0...3 |
0 - принудительный перевод "влево" |
| CV6 | Зарезервировано | 0 | Для работы со внешним датчиком положения | |
| CV10 | Зарезервировано | 0 | Текущая позиция |
* опциональный в данном случае означает, что если декодер не знает своей позиции при включении (питание отключилось во время перевода), то он будет переведен в указанное положение.
Декодер может быть возвращен к начальным установкам путем записи CV8 в режиме программирования.
Возможно ручное управление декодером при помощи аппаратной кнопки.
На плате декодера предусмотрен специальный разъем для подключения дополнительных функций или внешних датчиков, таких, как оптический датчик положения. Для использования этого функционала требуется специальная адаптированная прошивка.
| Элемент | Обозначение | Номинал |
|---|---|---|
| Arduino | Pro-mini | ATMega 328 5V 16MHz |
| Драйвер | MX1508 | Mini L298N |
| Стабилизатор | AMS1117 | 3.3V |
| Оптопара | OK1 | 6N137 |
| Конденсатор | C1 | 10uF 16V |
| Диод | D1 | 1N4148 |
| Резистор | R1 | 3.3K 1/2W |
| Резистор | R2 | 10K 1/4W |
| Резистор | R3 | 10K 1/4W |
| Резистор | R4 | 1K 1/4W |
| Резистор | R5 | 1K 1/4W |
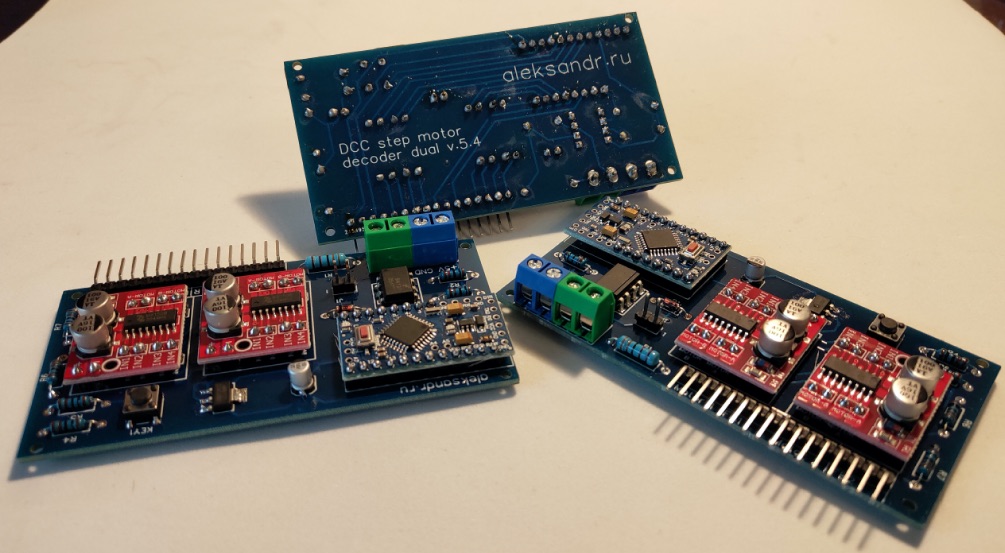
Двойной декодер
Предназначен для управления двумя аксессуарами на основе шаговых двигателей в сети DCC, например, приводом стрелки и расцепителем.
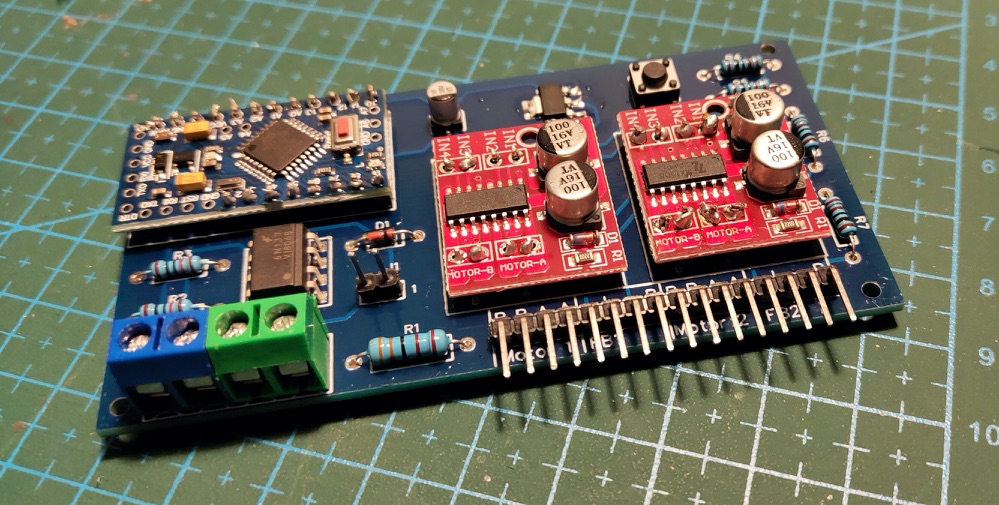
Функционально и технически идентичен предыдущему декодеру, за исключением отсутствия дополнительного разъема. Выходы дополнены разъемами подключения для второго двигателя и индикации его положения. Управление двигателями осуществляется параллельно т.е. работа одного не блокирует работу другого, например, два подключенных привода стрелок могут двигаться одновременно.
Настройки отличаются и дополнены параметрами управления вторым двигателем.
| CV | Назначение | По-умолчанию | Диапазон | Пояснение |
|---|---|---|---|---|
| CV1 | Адрес декодера | 5 | 1...254 | Для второго адрес+1 |
| CV2 | Roco адресация | 1 | 0-1 | Смещение адреса на 4 |
| СV13 | Кол-во шагов | 45 | 1...254 | Мотор двигается на х10 |
| CV14 | Скорость | 30 | 1...254 | Скорость вращения |
| CV15 | Режим инициализации | 0 | 0...3 | 0 - принудительный перевод "влево" 1 - принудительный перевод "вправо" 2 - опциональный перевод "влево" 3 - опциональынй перевод "вправо" |
| CV16 | Зарезервировано | 0 | Текущая позиция | |
| CV23 | Кол-во шагов 2 | 0 | 0...254 | Для второго мотора (0 - использовать CV13) |
| CV24 | Скорость 2 | 0 | 0...254 | Для второго мотора (0 - использовать CV14) |
| CV25 |
Режим инициализации 2 (для второго мотора) |
0 | 0...3 | 0 - принудительный перевод "влево" 1 - принудительный перевод "вправо" 2 - опциональный* перевод "влево" 3 - опциональный* перевод "вправо |
| CV26 | Зарезервировано | 0 | Текущая позиция второго мотора |
* опциональный в данном случае означает, что если декодер не знает своей позиции при включении (питание отключилось во время перевода), то он будет переведен в указанное положение.
Ручное управление вторым двигателем осуществляется при помощи двойного нажатия кнопки.
Элементная база дополнена следующими позициями
| Элемент | Обозначение | Номинал |
|---|---|---|
| Драйвер-2 | MX1508 | Mini L298N |
| Резистор | R6 | 1K 1/4W |
| Резистор | R7 | 1K 1/4W |
Шаговый двигатель
Данные декодеры были разработаны для управления миниатюрными шаговыми двигателями, с помощью которых можно управлять множеством аксессуаров на макете железной дороги, а не только приводом стрелки.
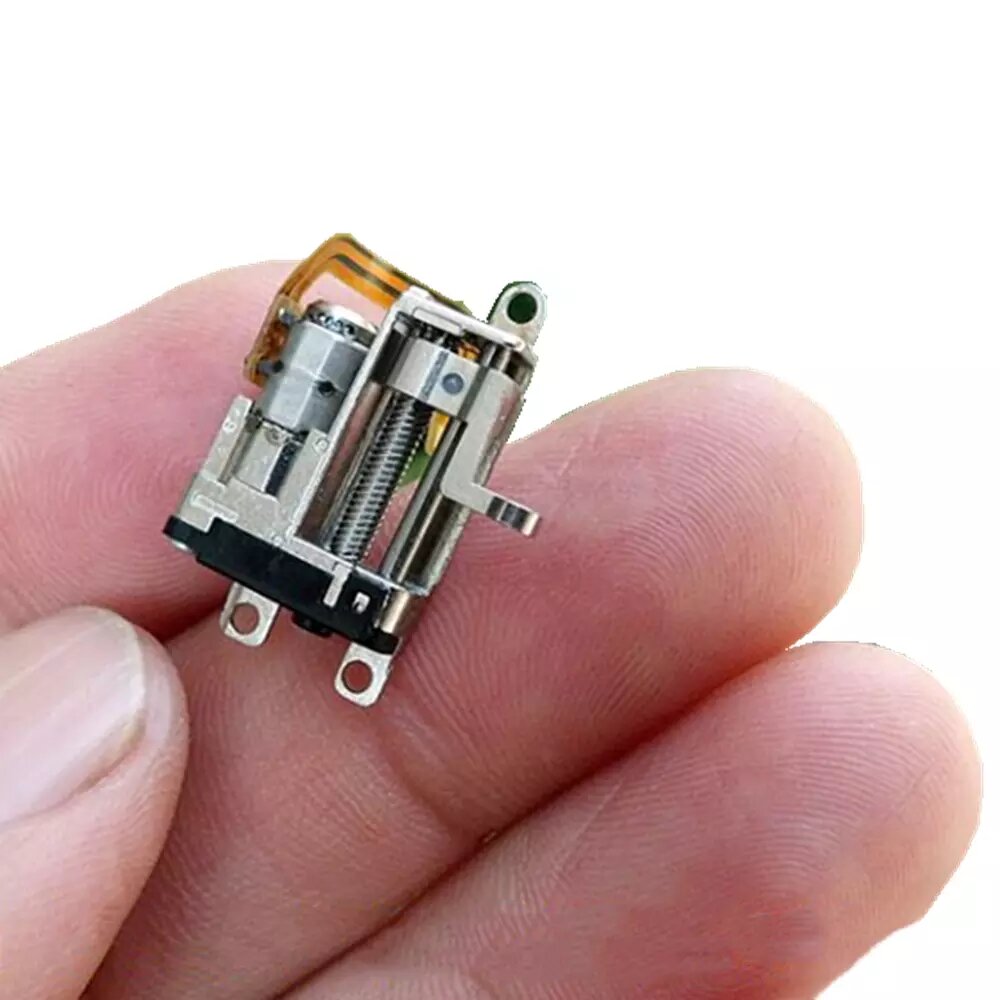
Декодеры подходят и для других вариантов шаговых двигателей, которые есть в продаже.
КИТ для самостоятельной сборки
Данные декодеры вы можете приобрести у меня в виде КИТа для сборки стрелочного привода в масштабе 1:87 (H0) для стрелок производства Peco. В комплекте: печатная плата, набор элементов для сборки декодера, шаговый двигатель с редуктором, шлейф для подключения, разъемы, детали для выбранного варианта привода стрелки. Так же по вашему заказу может быть изготовлен привод стрелки для другого производителя и масштаба. Если заинтересовало - пишите!
Инструкция по сборке декодера
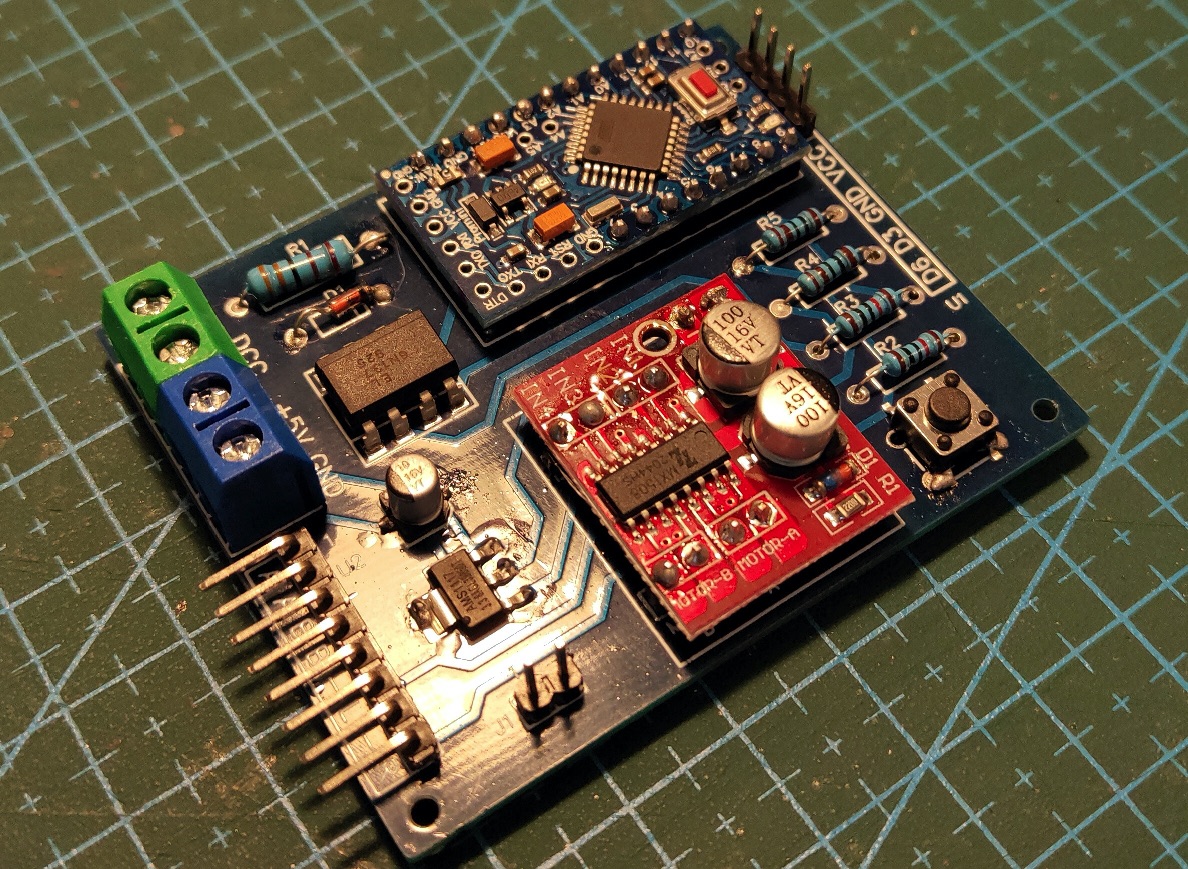
Сначала устанавливаются SMD компоненты: конденсатор C1 и стабилизатор AMS1117.
Затем компоненты в порядке убывания термостойкости: терминалы подключения питания и DCC, пины включения режима программирования J1, и пины подключения моторов и обратной связи, кнопка, резисторы и диод. Потом оптопра OK1.
Для монтажа каждого драйвера нужно подготовить 4 двухконтактных пина и 2 одноконтактных (они используются для подключения питания драйвера, где расстояние между отверстиями больше стандартного). Пины нужно вставить в отверстия на плате декодера, затем поместить на них драйвер и припаять. После этого перевернуть декодер придерживая драйвер и припаять пины к плате.
Для монтажа ардуино следует обрезать один ряд пинов из комплекта согласно отверстиям на плате декодера. Вставить пины в плату и расположить на них ардуино:
- для одинарного декодера так, чтоб кнопка сброса на ардуино была ближе к краю платы декодера, а вывод DTR ардуино ближе к центру платы декодера (см. фото выше);
- для двойного декодера так, чтоб кнопка сброса на ардуино была ближе к центру платы декодера, а вывод GND ардуино ближе к углу платы декодера (см. фото выше).
Затем припаять ардуино, перевернуть плату декодера придерживая ардуино и припаять пины к плате.