Другая голова Anet ET4 Pro
Дурная голова... нормально печатать не дает!
(с) старинная 3д-пословица
Вот и пришло время заменить печатающую головку на моем Anet ET4 Pro. Пришел я к этому не только потому, что мне хотелось попробовать директ экструдер и попалась подходящая голова, но и от того, что не хотел больше мириться с недостатками родной головы, к которым можно отнести:
- Бесполезный емкостной датчик положения по оси Z, мало того, что принтер после автоматической калибровки не запоминает его результаты, так еще и от раза к разу он показывает весьма разные результаты измерений, что в свою очередь, приводит к лотерее при каждом запуске печати.
- Неправильная конструкция хотенда и, в частности, системы охлаждения, из-за которой деградирует трубка подачи пластика и образуются пробки.
- Быстрая деградация сопла обдува пластика (производитель печатает его из ABS), особенно при использовании чехла для нагревателя, который получается с ним почти в плотную. На качество печати это вроде не особо влияет, но до кучи пусть будет.
Часть проблем решабельна отказом от автоматического датчика положения в пользу микро выключателя, но вот с охлаждением все сложнее и нужно радикальное решение.
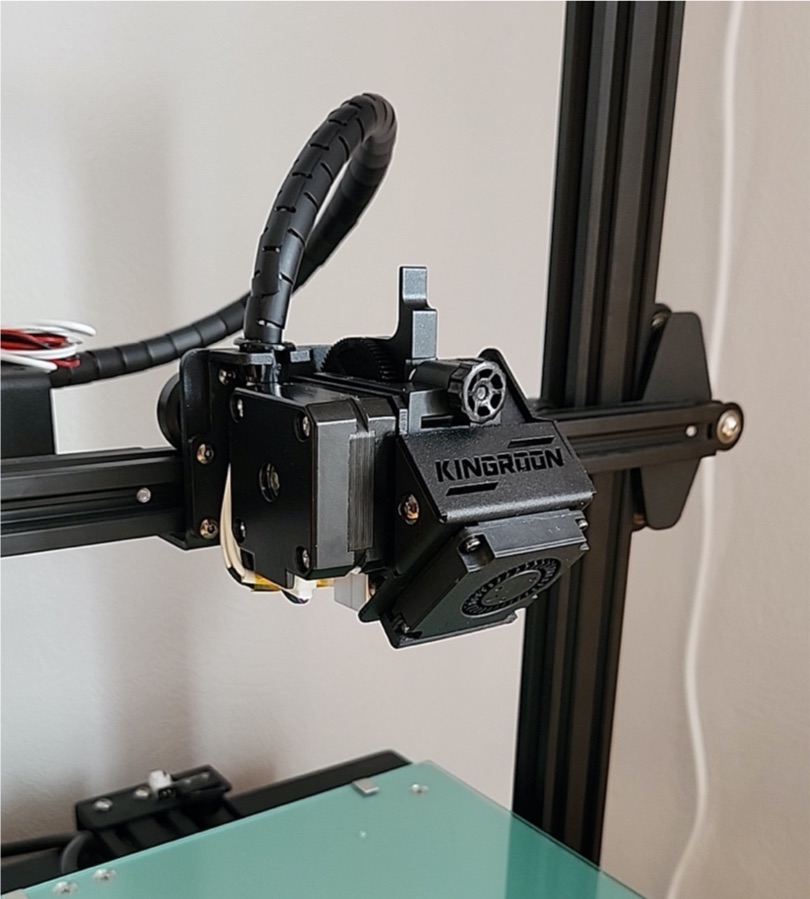
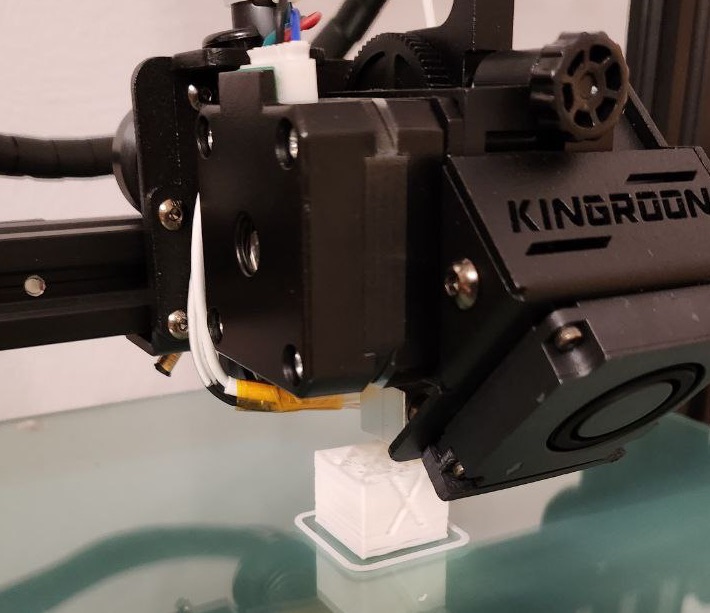
Когда мне на глаза попался китайский клон E3D Titan Aero - полностью собранный директ экструдер на тележке под профиль 2020, да еще и по цене около 3000 руб., то заказал его без колебаний. Идея дорогостоящей замены принтера превратилась в бюджетное приключение по замене головы.
От аналогов эту конструкцию с надписью "Kingroon" отличает уменьшенный, а значит более легкий, мотор экструдера. Это важно, особенно для принтеров, которые не были спроектированы таскать тяжелый экструдер на печатающей головке.
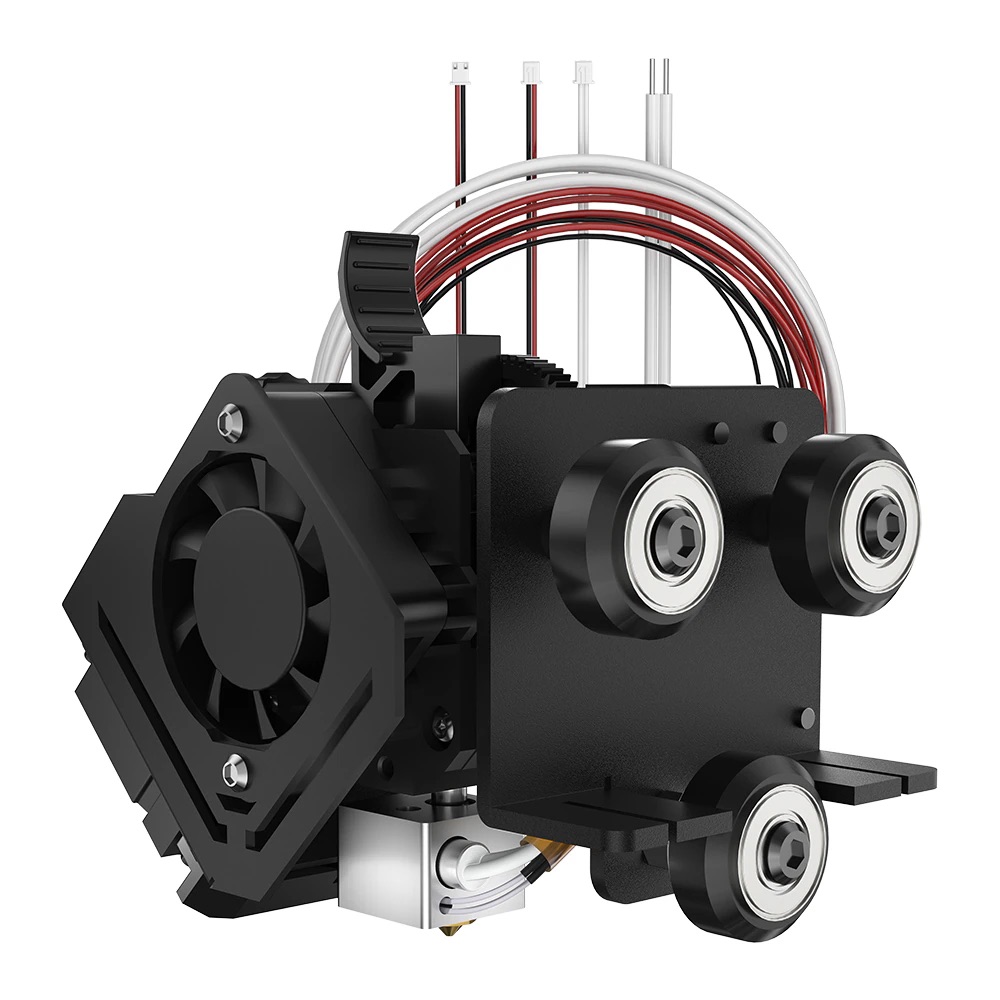
Хорошо, что в комплекте идет провод-удлиннитель для подключения мотора на головке от старой проводки. Не очень хорошо, что провода никак не подписаны, поэтому вентиляторы придется искать "методом тыка".
Все провода длинные с хорошим запасом. Провода нагревателя заметно толще, на конце просто залужены, видимо предполагается их подключение в клеммную колодку, а не в разъем. Для подключения вместо родного нагревателя Anet ET4 Pro, их придется обжать в разъем JST XH 2.54mm. Поскольку провода толстые, то для их обжима потребуется не только обжималка с тонкими губами, но еще терпение, сноровка и точный размер зачистки провода. Я запорол 3 клеммы перед тем, как вышло нормально.
Если лень возится с обжималкой или просто не получается, можно взять готовый обжатый разъем и припаять к нему, полярность для нагревателя значения не имеет. Так же можно использовать нагревательный элемент с правильным разъемом от родной головки.
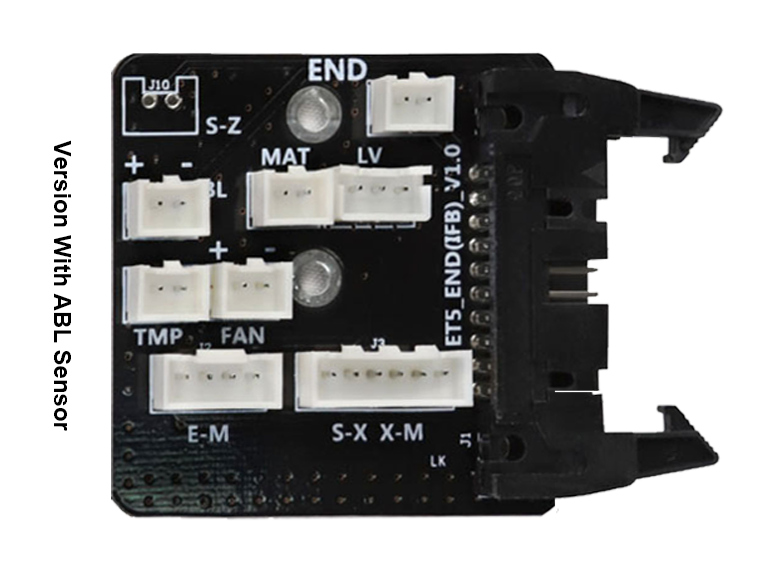
Подключение новой головы производится в те же разъемы на плате. Маркировка разъемов там не особо для меня очевидная, поэтому вот пара картинок и описание что к чему:
| Маркировка | Назначение |
|---|---|
| S-Z | Концевик оси Z (впаять разъем если нет) |
| END | Нагреватель хотенда |
| BL | Вентилятор обдува сопла |
| MAT | Датчик конца филамента |
| LV | Автоматический датчик уровня (не исползуется) |
| TMP | Датчик температуры хотенда |
| FAN | Вентилятор охлаждения радиатора хотенда |
| E-M | Мотор экструдера |
| S-X X-M | Совмещенный разъем концевика оси X и мотора оси X |
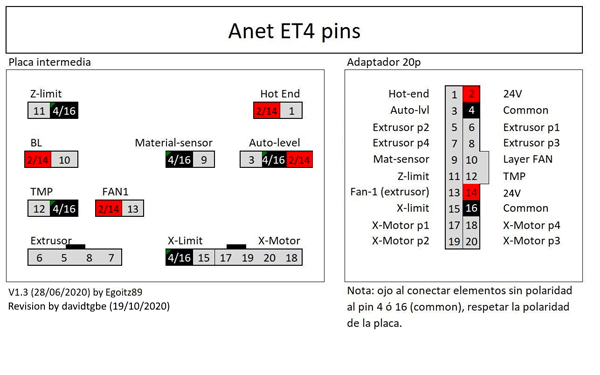
Огромная благодарность авторам картинки с детальным описанием пинов выше за то, что они ее сделали, она единственная в интернете и очень полезная!
К сожалению, просто так поставить новую головку на место старой не получится, придется снять пассивный ролик ремня на оси X, после чего тележка достаточно туго оденется на рельсу, но это не страшно, разработается. Если совсем не лезет, нужно проверить втулку нижнего ролика, она должна быть правильно установлена и утоплена в отверстие на тележке. Для того, чтоб натянуть приводной ремень на новую тележку, придется ослабить крепление мотора на оси X, и почти полностью сдвинуть его к центру, поскольку расстояние между креплениями ремня на новой тележке меньше, чем на родной. Ну или использовать другой более длинный ремень (тип GT2, ширина 6 мм., но его по краям придется обжать вот в такие скобы или что-то аналогичное).
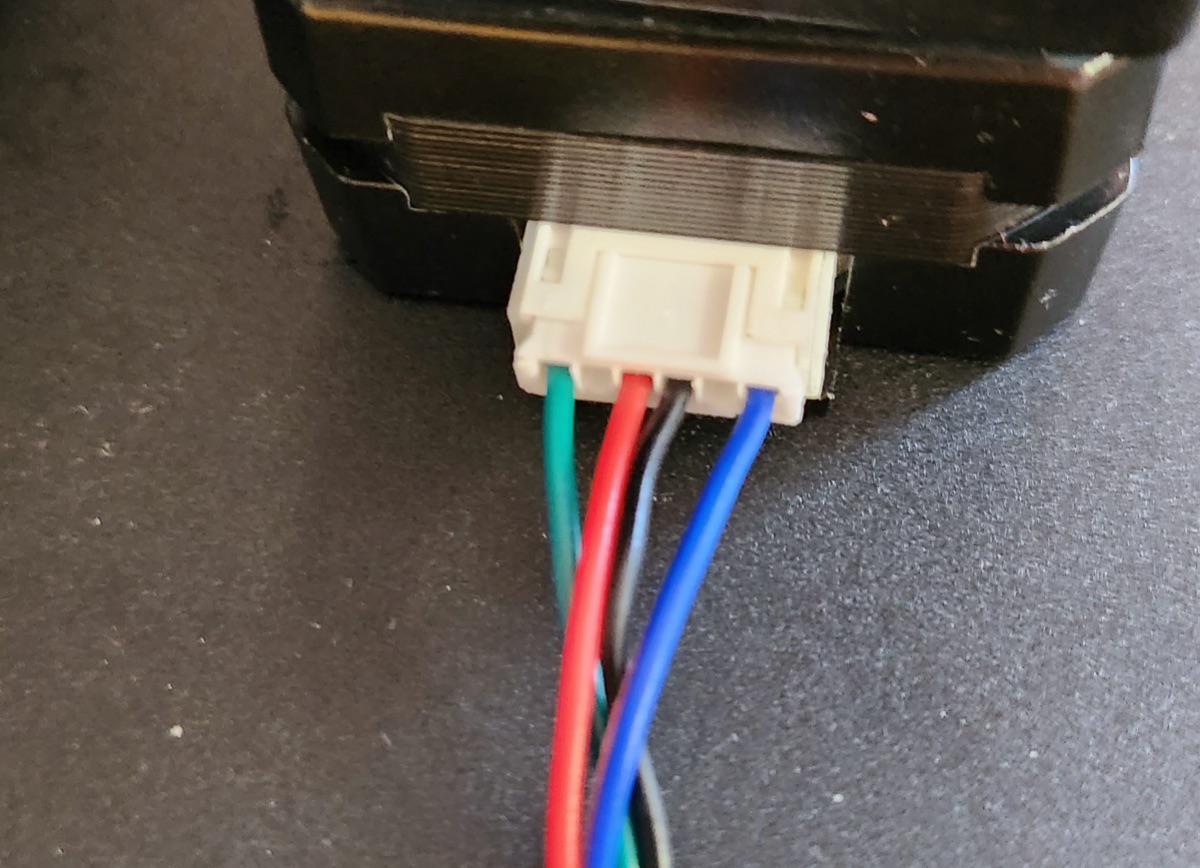
Когда я все собрал и установил, то заработало все, кроме экструдера: вместо подачи пластика он подергивался или вообще не шевелился. Причина в том, что на новом экструдере установлен (предположительно тк нет маркировки) мотор 17HS4023, а на старом был 42SHDC3025-24B (по ссылке идентичный).
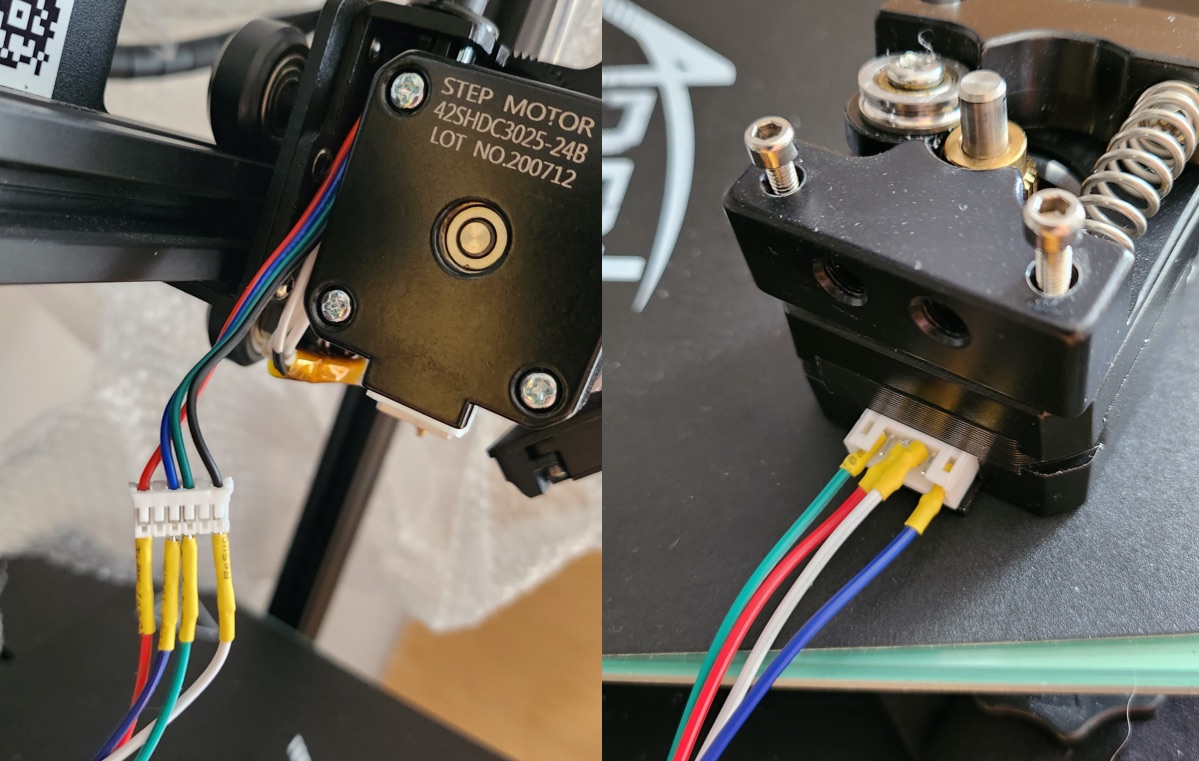
При внешней схожести моторов, у них по-разному разведены разъемы на корпусе. Просто подключив один вместо другого, он не заработает, как ожидается. Изучив характеристики обоих моторов, получилось вот что:
| Пин | Провод | 42SHDC3025-24B | 17HS4023 | Должно быть | Получилось у меня |
|---|---|---|---|---|---|
| 1 | Красный | A+ | A+ | Красный | Зеленый |
| 3 | Синий | A- | B+ | Зеленый | Красный |
| 4 | Зеленый | B+ | A- | Синий | Черный |
| 6 | Черный | B- | B- | Черный | Синий |
Фактически, нужно просто поменять местами центральные провода в разъеме и все заработает. Но так получилось, что у меня в результате экспериментов с проводами вышла инвертированная версия. Мне было легче инвертировать направление мотора экструдера в прошивке, чем еще раз перебирать разъем, который для таких операций не предназначен.
Разница электрических характеристик моторов минимальна: у 42SHDC3025-24B опорное напряжение 3.96V, ток 0.9A, а у 17HS4023 - 4.1V и 1.0A соответственно. Если почитать описание замены экструдеров в интернете, то при замене мотора обычно делается настройка драйвера под новые параметры, но у Anet ET4 Pro на плате нет подстроечных резисторов для драйверов, поэтому этот шаг пропускаем, уповая на минимальную разницу характеристик.
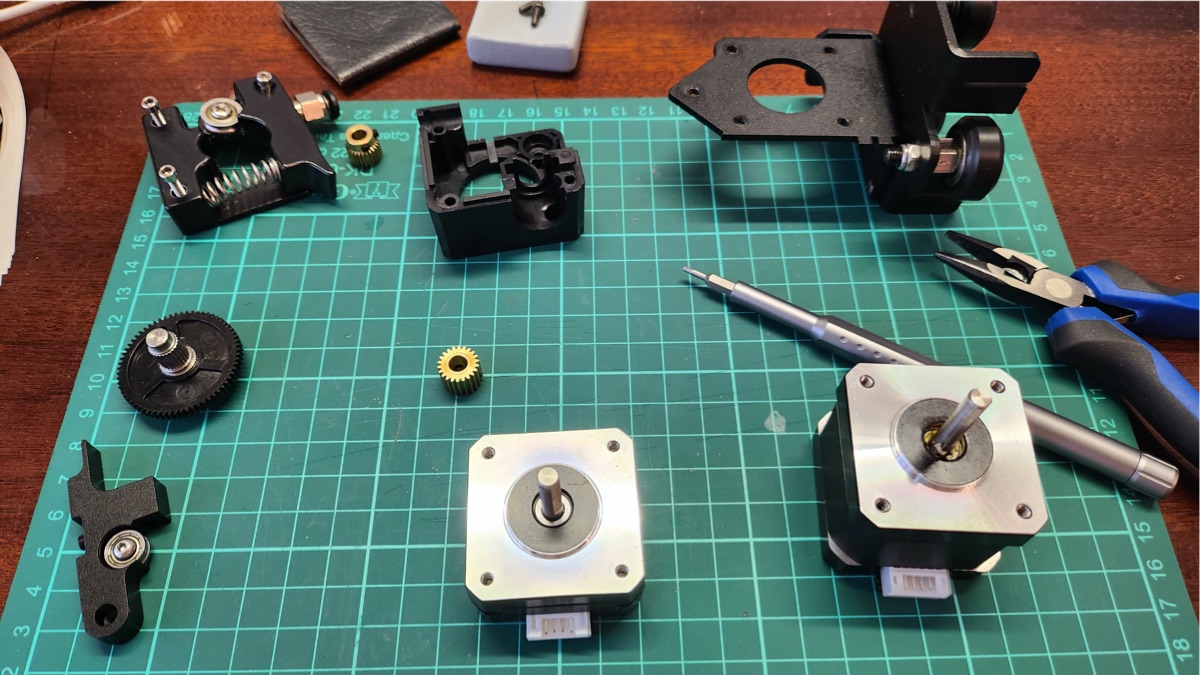
В процессе упражнений с моторами мне пришлось несколько раз собрать-разобрать новую головку до основания. Этот процесс сильно облегчило описание от производителя оригинала. От себя в конструкцию китайского клона добавил (видимо забытую) гровер-шайбу на третий винт крепления радиатора и обычную плоскую шайбу на вал мотора между шестерней и прижимным рычагом. Эта модификация позитивно сказалась на процессе загрузки пластика в экструдер, пруток перестал упираться в трубку сразу после шестерен и стал заходить с первого раза. Плюс большая пластиковая шестерня теперь вообще не касается железного прижимного рычага при работе, целее будет. Этого можно было так же добиться смещением на 1 мм. шестерни на вале мотора, но уж очень не хотелось опять все разбирать до основания. Сам вал мотора по длине впритык для такой конструкции и не заходит даже в отверстие под него в радиаторе, он кончается ровно там, где заканчивается прижимной рычаг, был бы длиннее на 5-10 мм. - было бы идеально.
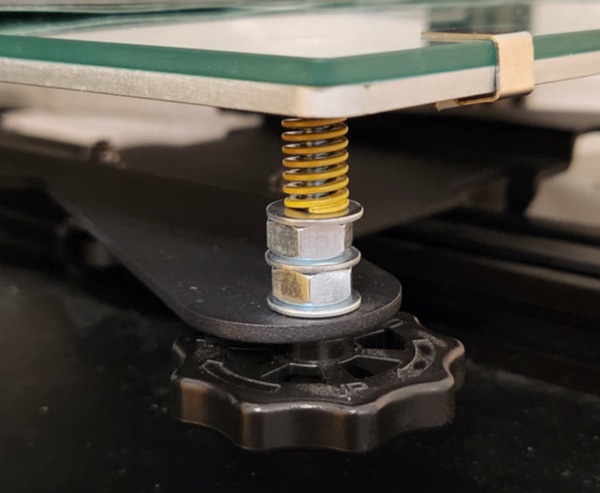
Когда эксперименты с моторами закончены и голова вновь собрана и установлена, выясняется, что сопло теперь слишком высоко и не достает до стола примерно на 10-15 мм. даже в самом низком положении оси Z. Стол придется поднимать. Для этого штатные винты М4х30 нужно заменить на М4х40 (можно и 45 лишь бы ремень не задело), а недостаток высоты пружин компенсировать широкополыми кузовными шайбами М5 и гайками М6. Понадобится 3 шайбы и 2 гайки на каждую опору, итого 12 шайб и 8 гаек. Можно убрать по одной из гаек и поставить более длинные пружины, но цена вопроса возрастет на стоимость новых пружин против стоимости гаек.
После всех этих изысков, механическая часть пригодна для работы и можно браться за конфигурацию прошивки под новую аппаратную часть. Суть изменений, помимо замены емкостного датчика на концевик, заключается в том, что поскольку у новой головы сопло расположено иначе, то принтеру нужно объяснить новую геометрию в которой он будет работать. И, поскольку механика экструдера теперь другая, то изменить количество шагов на миллиметр для подачи пластика. Это значение я взял из той же оригинальной инструкции, контрольно измерил линейкой, примерно совпало - для старта достаточно, тюнинг потом, см. в конце статьи. Получившаяся конфигурация доступна на моем гитхабе, а все изменения от оригинала видны в диффе, но хочется отметить, что из-за новой головы пришлось заметно уменьшить размер стола по Y.
И вот, наконец, первая пробная печать. Кубик вышел так себе, нужно будет поправить температуру, ретракт и количество шагов экструдера, но это все уже делается вне принтера. На этом работу по замене печатающей головки можно считать успешной.
Калибровка нагревателей и прочий тюнинг
После замены нагревателя специалисты настоятельно рекомендуют калибровать его пропорционально-интегрально-дифференцирующий регулятор так же известный как PID-регулятор. И это обязательно нужно делать, если качество печати после замены не устраивает. Вот статья об этом процессе, относительно прошивки Marlin. В моем случае требуется откалибровать нагреватель хотенда, поскольку он был заменен вместе с головой, и нагреватель стола, поскольку после замены прошивки этого не делалось. Все буду делать через Pronterface, хотя команды можно отправлять и через Cura. Настройки по-умолчанию, скорость соединения 115200.

Для калибровки хотенда отправляем команду M303
M303 E0 C10 S200
И дожидаемся окончания, в выводе будет что-то вроде
#define DEFAULT_Kp 16.62 #define DEFAULT_Ki 1.21 #define DEFAULT_Kd 57.16
Устанавливаем полученные параметры с помощью M301 и сохраняем командой M500
M301 P16.62 I1.21 D57.16 M500
Теперь калибровка нагревателя стола, для этого используется та же M303, но с другими параметрами
M303 E-1 C10 S60
Так же дожидаемся окончания и результата вроде
#define DEFAULT_bedKp 104.30 #define DEFAULT_bedKi 20.06 #define DEFAULT_bedKd 361.59
Устанавливаем параметры теперь с помощью M304 и сохраняем M500
M304 P104.30 I20.06 D361.59 M500
Для контроля можно перезагрузить принтер и спросить у него настройки с помощью M503
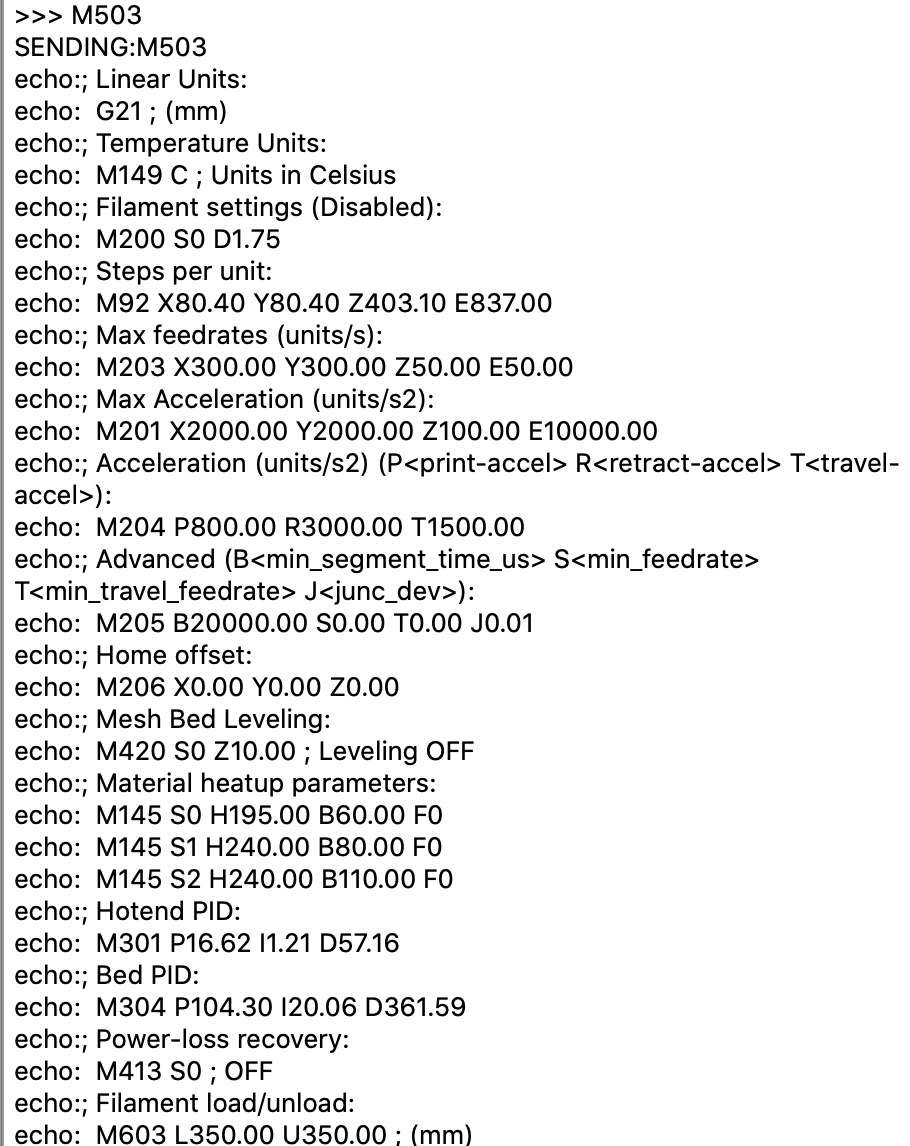
В выводе должны быть цифры, полученные выше (см Hotend PID и Bed PID). После этого качество печати действительно улучшается, а так же в моем случае, стол стал нагреваться значительно быстрее.
В последней строке видна команда M603, отвечающая за длину загрузки и выгрузки филамента. Значения остались от старого экструдера - 350 мм., для нового можно поставить 25 мм. при загрузке и 40 мм. при выгрузке:
M603 L25.00 U40.00 M500
И последнее, количество шагов мотора экструдера все же пришлось поменять. Опытным путем с маркером и линейкой не удалось достичь желаемого результата и пришлось обратиться к расчетам на основании характеристик мотора:
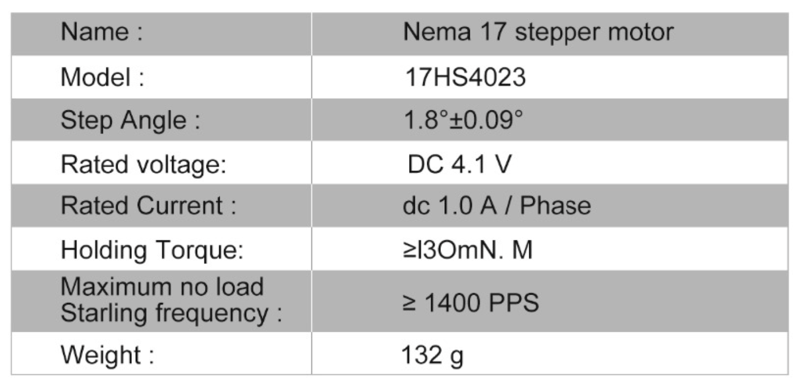
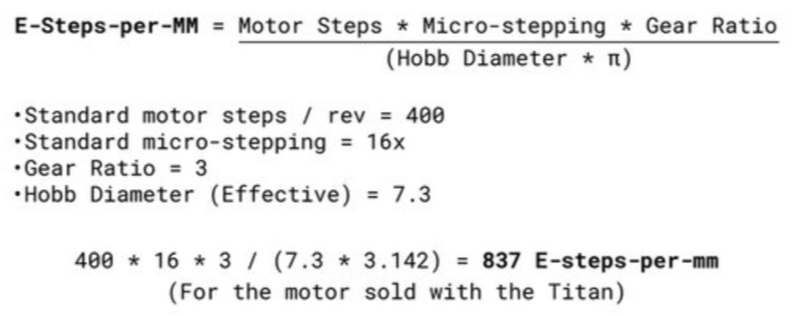
В моем случае получается Standard motor steps / rev = 360 / 1.8 = 200, остальные значения стандартные. Рассчитываем:
200 * 16 * 3 / (7.3 * 3.142) = 418.54
Получилось 418.54 против 837 из оригинальной инструкции к экструдеру. Заносим значения в принтер и сохраняем:
M92 E418.54 M500
С этим значением качество печати значительно улучшилось

Серый кубик - оригинальная голова, берем его за эталон; белый - новая голова, шаги подобраны линейкой, хорошо видна переэкструзия; синий - шаги рассчитаны по формуле выше, очень близок к эталону. Теперь можно сказать, что принтер вполне сносно печатает 