Инжектор питания XpressNet
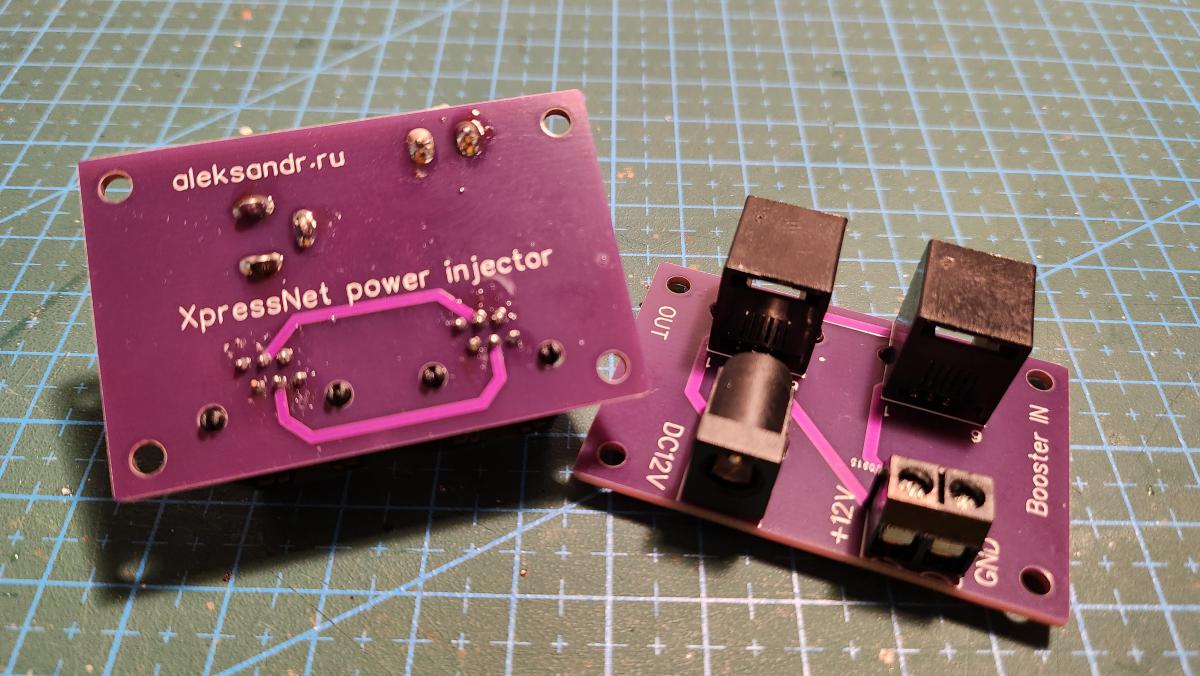
На моем железнодорожном макете имели место ложные срабатывания датчиков обратной связи. После долгих исследований и общения с производителем, было установлено, что причиной проблем является недостаточная мощность питания модулей обратной связи под макетом. Экспериментально убедившись, что дополнительное питание решает проблему, я пошел делать новую плату.
Прошёл второй год стройки ЖД-макета дома

Прошел еще год стройки макета дома. Активная фаза строительства завершена и можно подводить итоги. Сделано все, что было задумано: все построено, подключено, светится и ездит. Остались какие-то вещи на уровне обслуживания и автоматизации, но глобально стройка завершена. Здесь как с ремонтом, его невозможно закончить, можно только прекратить. Всегда останется что улучшить, доделать или переделать.
Компьютерное управление макетом железной дороги

В качестве компьютера, управляющего моим макетом выступает малютка Raspberry Pi 3. Само по себе "компьютерное управление" делится на две части: взаимодействие с аппаратным пультом управления макетом (экран, кнопки) и автоматика в движении поездов на макете.
ТО для Rivarossi Breuer Traktor
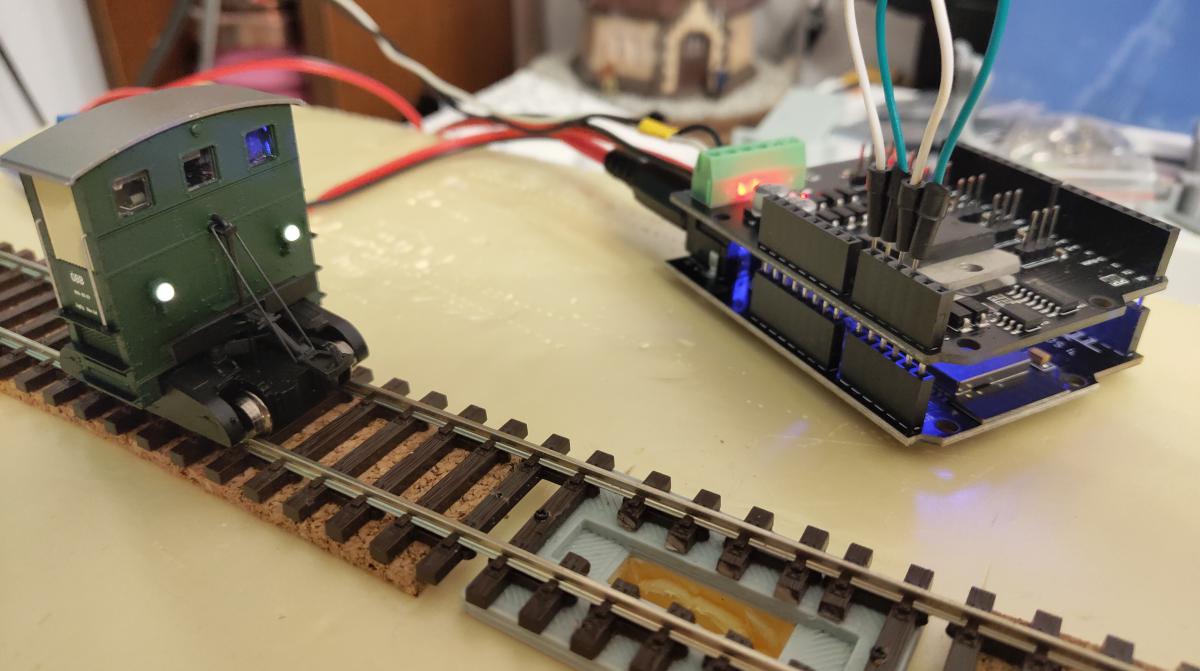
Где-то лет 10 назад я стал обладателем модели Rivarossi HR2125 Öbb Breuer Traktor 0040503. Это очень необычный локомотив, маленький и с неординарной внешностью. Не смотря на малый размер, у него есть разъем для DCC-декодера и место для прозрачной кабины, в которой лишь от части видна электроника внутри.
Купив себе этот локомотив, я первым делом поставил в него декодер, проверил, что все работает и... он остался жить в коробке на полке, дожидаясь своего часа, когда сможет ездить по макету.
Подмакетное царство, DCC и обратная связь
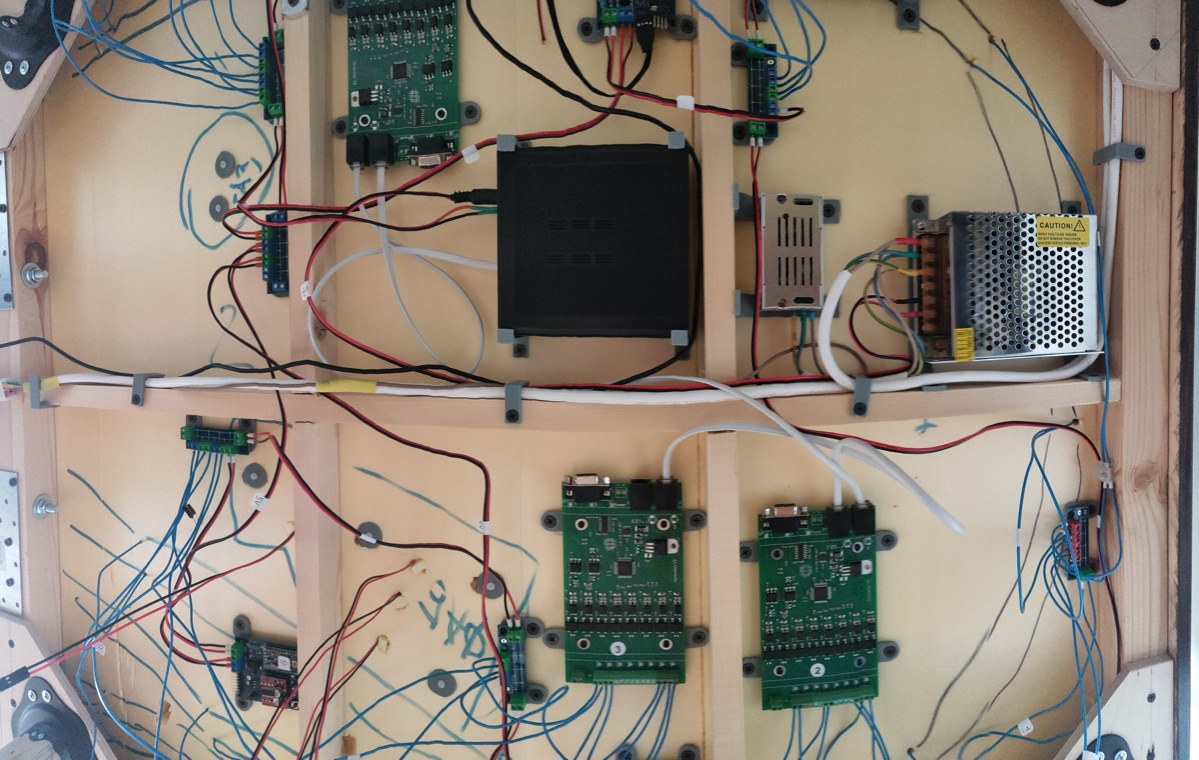
Это скорее заметка для себя, нежели полезная информация для общества. Концептуально все просто: есть шина DCC и есть модули обратной связи, бери да подключай. Сложность заключается в правильном подключении кучи проводов, свисающих под макетом от рельсов.
Лежа под макетом начинаешь ценить наличие инструмента: обрезка для зачистки проводов и обжималка для наконечников очень облегчают трудоемкий процесс. Сидя за столом это не сильно ощущается, а вот под макетом - совсем другое дело!